

Video camera reference method only using plane reference object image
A technology for calibrating objects and cameras, which is applied in the field of camera calibration and geometric correction of images, which can solve the problems of difficult to determine the impact and low efficiency, and achieve the effects of improving calibration accuracy, simplifying the calibration process, and improving calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to better understand the technical solutions of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
[0020] Camera calibration method of the present invention comprises the following steps:
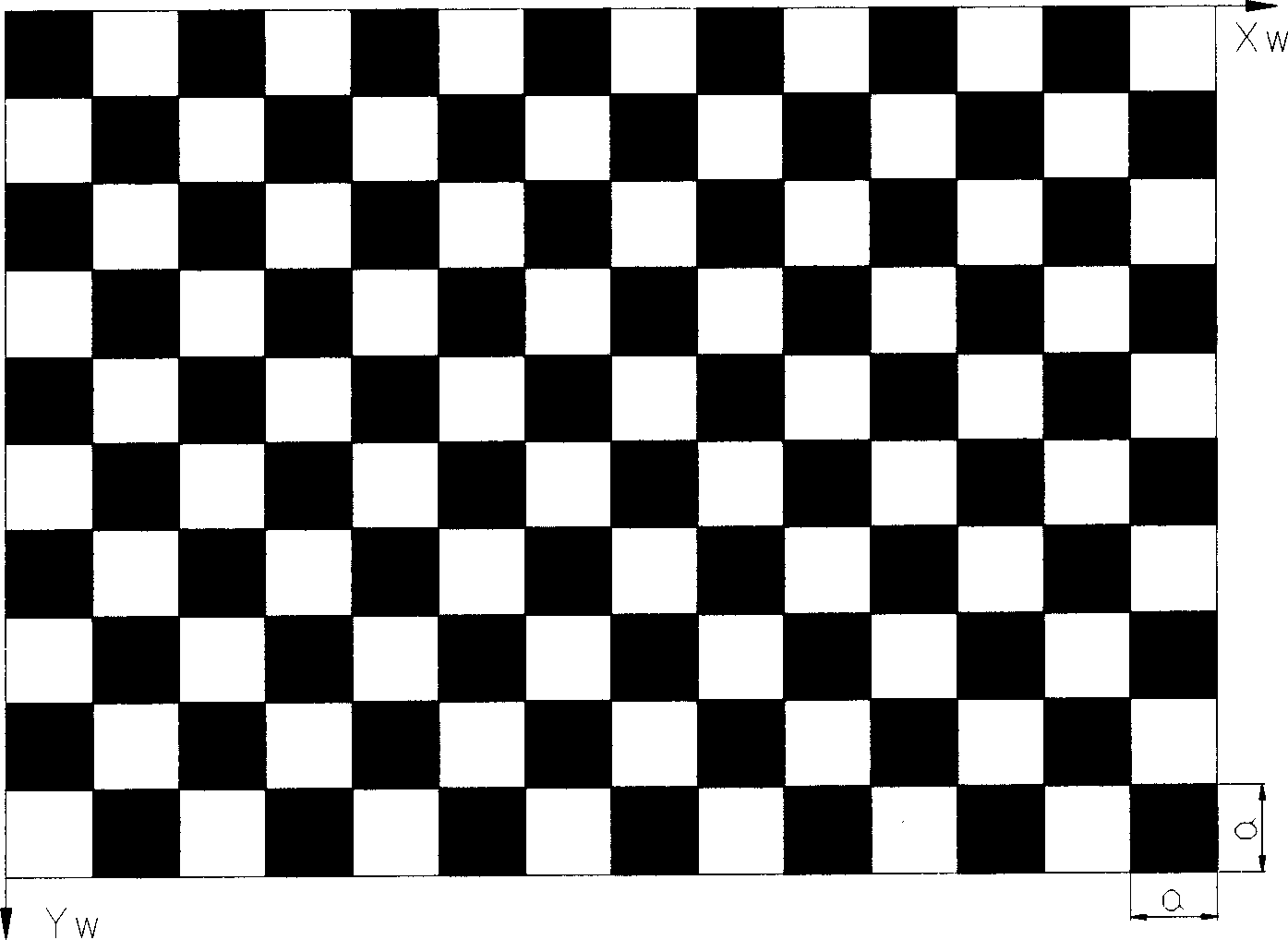
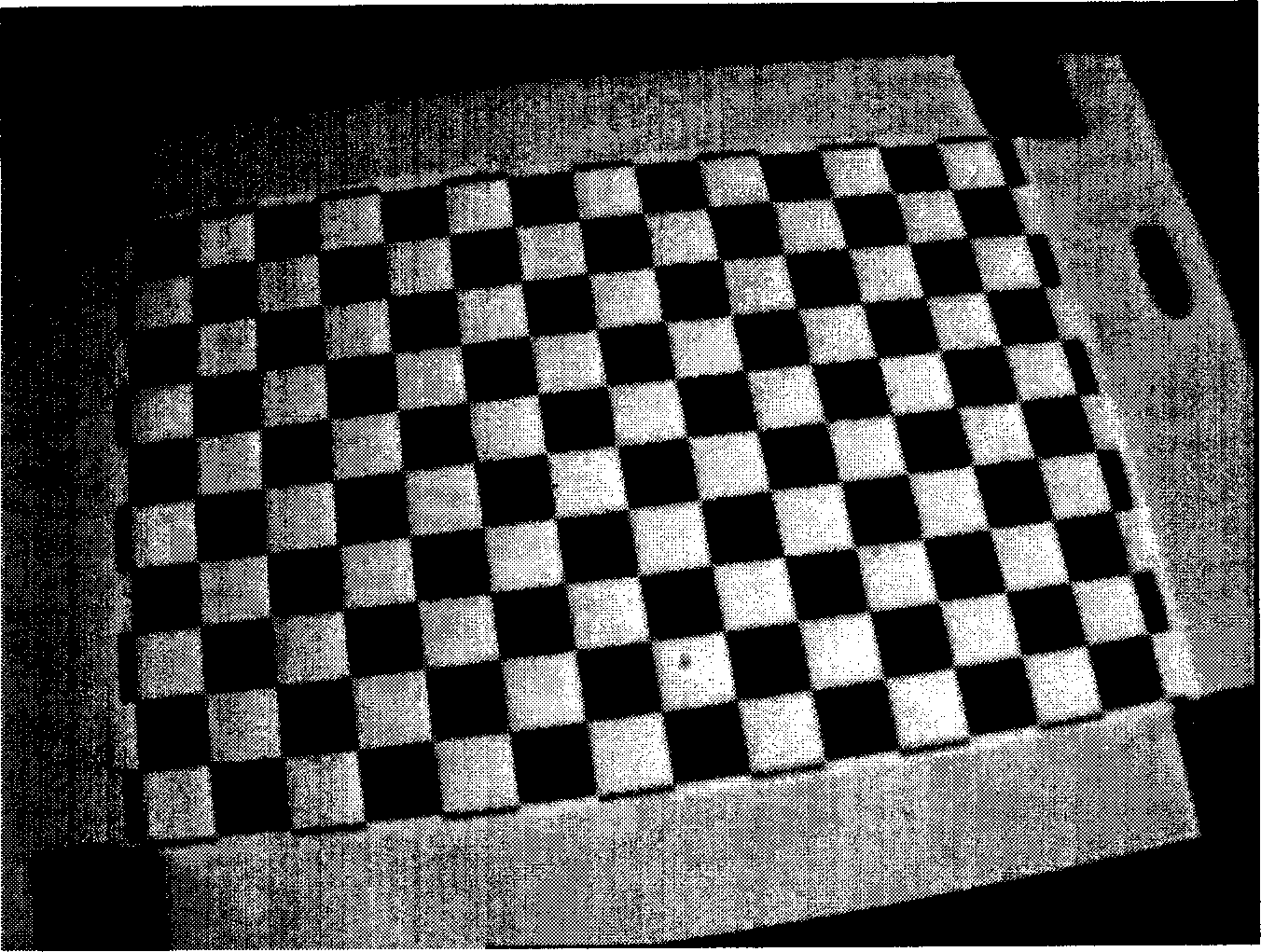
[0021] 1. Set the plane calibration object: Set two sets of parallel straight lines on a plane object as the plane calibration object. The two sets of parallel lines are perpendicular to each other, and the distance between the parallel lines in each group is known, so that the side length is known. flat grid graphics. The side length of the grid pattern changes according to the nominal focal length of different camera lenses. The smaller the nominal focal length, the larger the side length of the square pattern, and vice versa, so that when the image of the plane calibration object is taken, the camera and calibration The distance between objects is within the working range of the actual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More