

City area-traffic cooperative control method based wireless sensor network
A wireless sensor and sensor network technology, applied in the field of intelligent transportation, can solve problems such as difficulty in detecting fleet movement, inability to dynamically adjust, and inability to reflect real-time traffic flow changes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
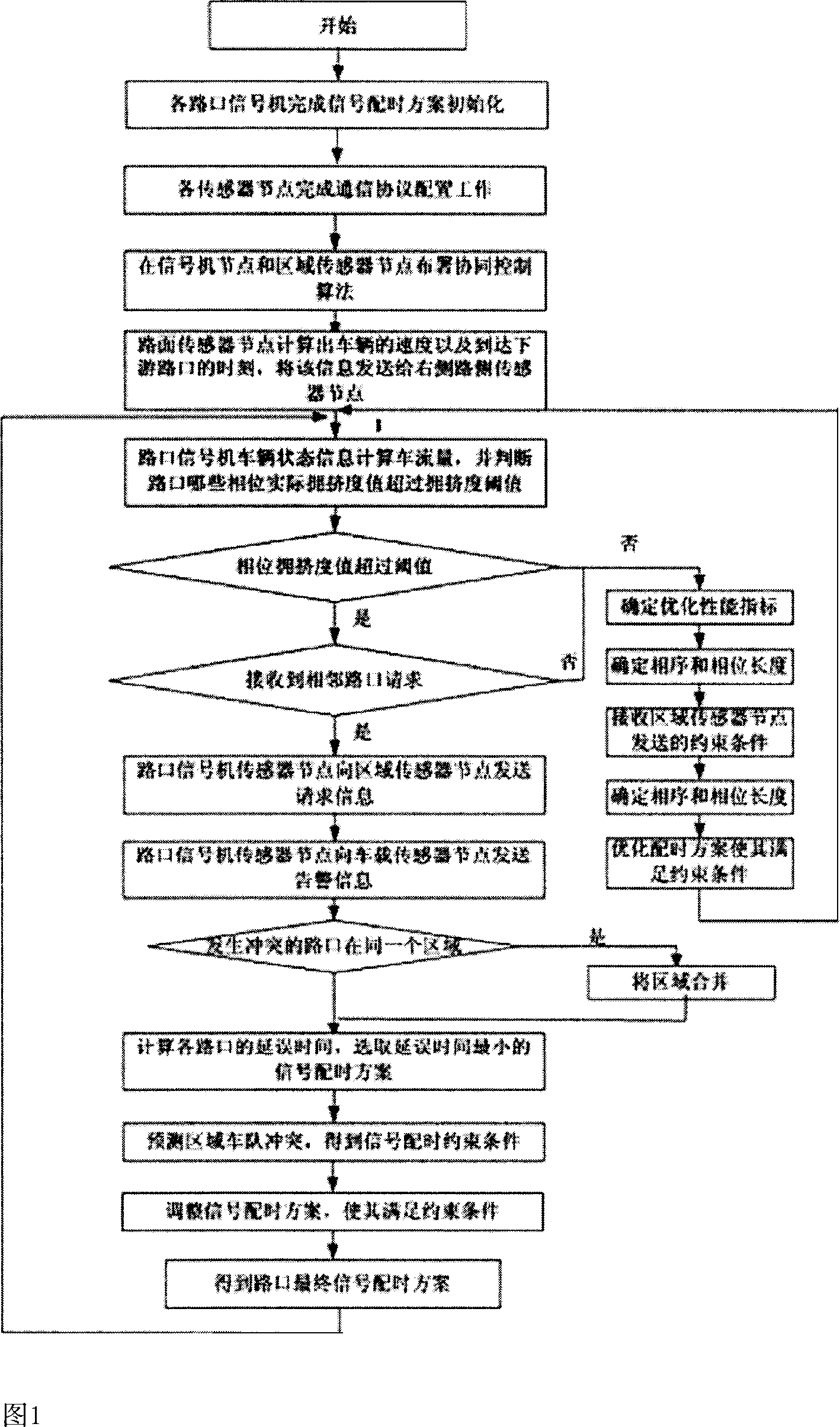
[0072] The specific implementation of the present invention will be introduced below from four aspects: the composition and placement of various sensor nodes, the collection of real-time traffic flow data information, the autonomous control algorithm and the collaborative control algorithm.
[0073] The composition of the sensor node and its location: the sensor nodes required by the present invention include road surface sensor nodes, roadside sensor nodes, signal sensor nodes, area sensor nodes, vehicle sensor nodes and remote control sensor nodes. Figure 12 shows.
[0074] In Figure 12, (1) is the road surface sensor node, which completes the collection function of real-time traffic flow data, and is composed of a magnetic sensor node and a wireless communication module. The wireless communication module is composed of a transmitting module, a receiving module and a microprocessor, and its power supply can be supplied by the roadside lamp power supply. The placement of roa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More