Both approaches entail relatively high moments of
inertia, and accordingly large motors and elevated power requirements.
Such configurations require extremely adverse tradeoffs and compromises between, on one hand, undesirably high cost and size, and on the other hand structural weaknesses that lead to unreliability and even failure.
These are significant handicaps for—in particular—devices that may be for use in airplanes and satellites.
Even in these cases, such drawbacks might be acceptable if such systems provided superb performance, but unfortunately
angular resolution in conventional systems of various types is generally no better than two-thirds of a degree—sometimes as coarse as ten degrees and more.
The poor
angular resolution and other performance limitations of such sensors arise in part from use of fixed, very large sensor assemblies, typically quad cells, CCD or
CMOS arrays, at a focal plane—with fixed fields of view.
These components accordingly also suffer from limited fields of regard.
Furthermore the necessity for downloading into a
computer memory the massive volumes of data from multimegabyte sensor arrays makes the
frame rate of these systems extremely slow.
This strategy, however, is counterproductive in that it only compounds the data-download problem, while also yielding intrinsically coarse
angular resolution and very nonlinear angular mapping.
In other words these systems are squeezed between the need for
high resolution and the need for broad field of regard; this squeeze comes down to an all-but-prohibitive demand for
dynamic range, or bandwidth.
Data congestion, furthermore, is doubly problematic because in these systems the entire contents of every frame must be retrieved before that frame can be searched for an optical source of interest.
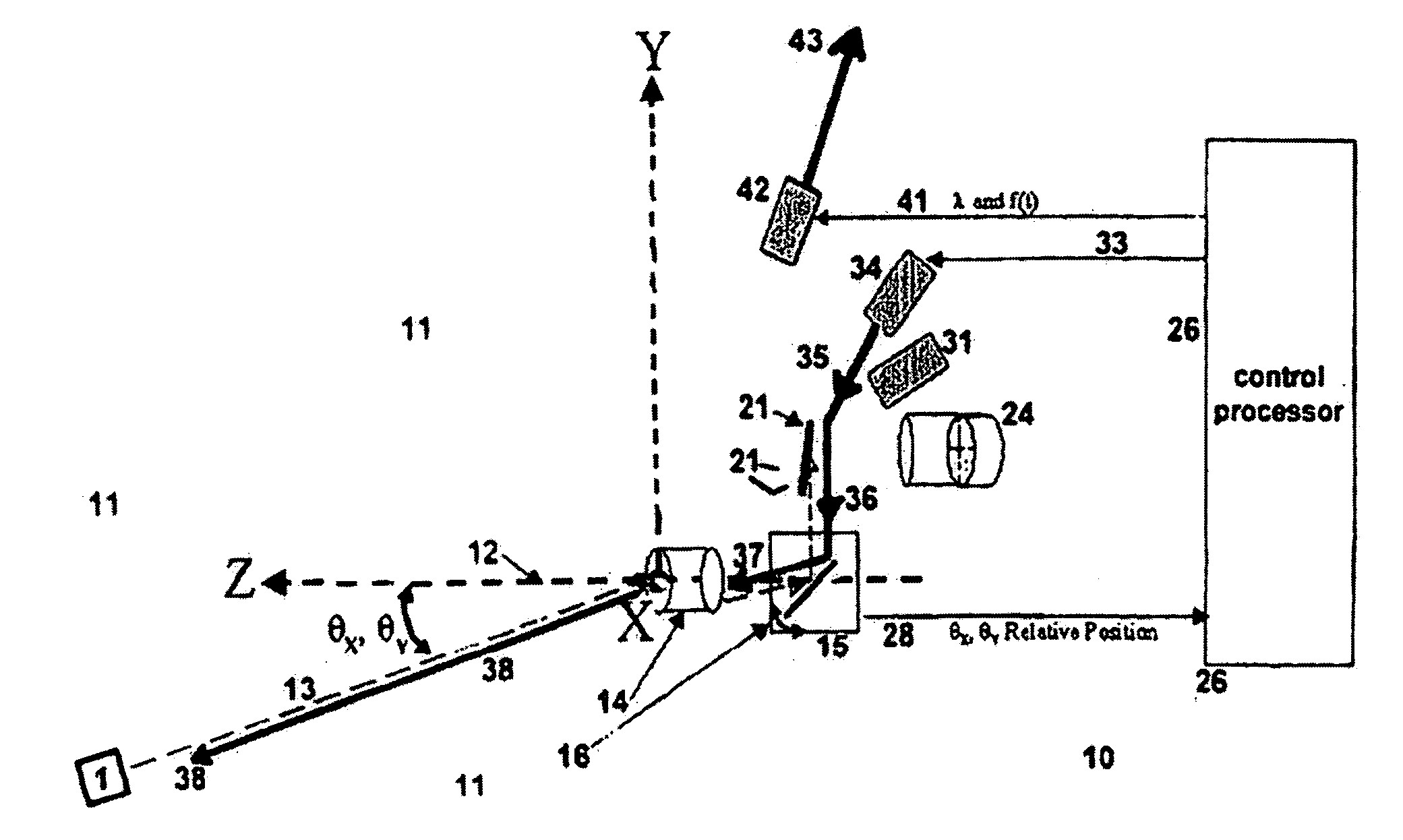
One rather unnoticed contributor to inadequate
dynamic range is the direct relationship between
gimbal angle or scan-mirror angle and excursion of the beam in the external scanned volume.
Since the direct effect of mechanical rotation is relatively slow for gimbals, and relatively limited in overall angular excursion for scan mirrors, the external beam-angle excursion is either slow or limited, or both.
Unfortunately these reported distances and therefore the angular mapping of a PSD are nonlinear, to the extent of several percent at the PSD edges—aggravating the analogous handicap introduced by a fish-eye or other wide-angle lens—and are also
temperature sensitive.
The detector may report accurately that an optical source has been sensed, but fail to report accurately where that object is, unless it is near the nominal center, or origin of coordinates.
In any conventional detector, however, this solution is impractical due to the lumbering response of an associated
gimbal system, or even of a scan mirror that is redirecting the light into the detector aperture.
In another sense, however, this is a difficult case from the standpoint of
confusion, because the object may have been designed to look (for its guidance) backward at the source rather than forward at the vehicle—in which event the ejection of reflecting particles cannot confuse the directional-control mechanisms of the object, as long as the pointing entity can keep the vehicle in view.
Such mirrors are too bulky and heavy to overcome the previously discussed problems of response speed.
Hence the overall device and even the individual mirrors are too big and heavy to free the optical-detection art from the response-speed and related limitations discussed above.
These mirror wheels are ordinarily made to spin continuously; hence the individual mirrors of such an array lack independent maneuverability for customized control movements.
Accordingly they are poorly suited for practical use in
rapid detection and tracking of a particular source object.
For present purposes, however, any interest in such devices is academic, as the movable components are relatively huge and far too massive to be useful in any rapid-
response system.
As can now be seen, the related art fails to resolve the previously described problems.



 Login to View More
Login to View More  Login to View More
Login to View More