

Wafer positioner with planar motor and mag-lev fine stage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057]The following is a detailed description of illustrative embodiments of the present invention. As these embodiments of the present invention are described with reference to the aforementioned drawings, various modifications or adaptations of the methods and or specific structures described may become apparent to those skilled in the art. All such modifications, adaptations, or variations that rely upon the teachings of the present invention, and through which these teachings have advanced the art, are considered to be within the scope of the present invention. Hence, these descriptions and drawings are not to be considered in a limiting sense as it is understood that the present invention is in no way limited to the embodiments illustrated.
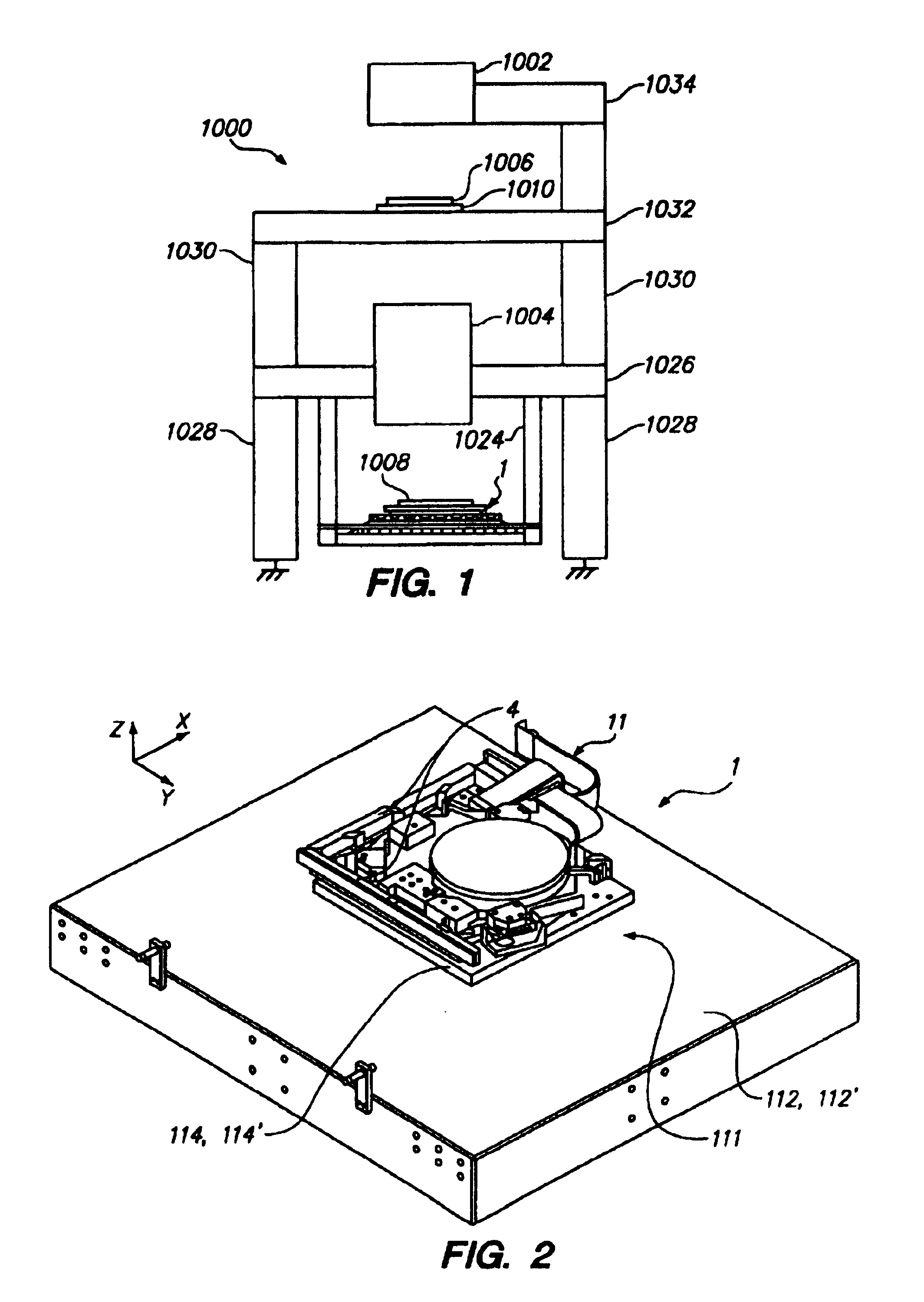
[0058]A brief description of a photolithography instrument will be given here as background for a preferred use of the positioning stage system according to the present invention. FIG. 1 is a schematic view illustrating a photolithographic in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More