

Device and method for monitoring guiding thread in knitting machine
A technology for knitting machines and yarn guides, which is applied to measuring devices, knitting, textiles and paper making, etc., can solve the problems of high cost, time-consuming maintenance work, difficulty in manufacturing yarn breakage detectors, etc., and achieve the effect of increasing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
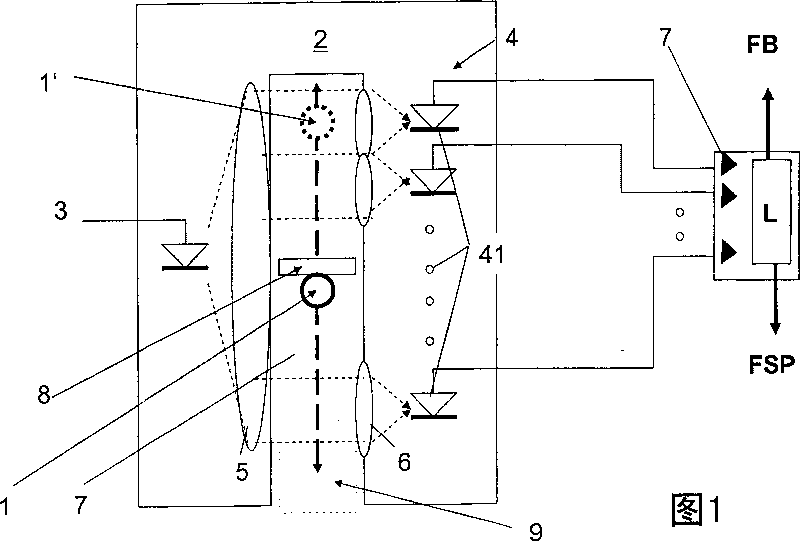
[0024] exist figure 1 A schematic diagram of the principle of a yarn sensor for monitoring the running of yarn in a knitting machine is shown in , which describes a cross-sectional view perpendicular to the extension line of the yarn passing through the device. It is assumed here that the yarn 1 is moved through a yarn feed direction which is oriented perpendicular to the drawing plane. The frame of the U-shaped structure shown around the position of the yarn 1 very schematically describes the optical sensor unit, which is formed in the form of a pair of fork-shaped optoelectronic devices. The fork-shaped optoelectronic device pair 2 has a light source 3 along one of its U-legs, which is configured in the form of a single-LED, a photodiode row or in the form of another light source of linear radiation and it on the other hand along its The further U-leg of the U-leg is provided with a photodetector arrangement 4 which, in the exemplary embodiment shown, consists of a combinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More