

Apparel type robot for healing hand function and control system thereof
A rehabilitation robot and control system technology, applied in the field of rehabilitation robots, can solve the problems of not being suitable for wearing, not introducing biofeedback, and non-compliance of the driving actuator, so as to achieve the effect of easy wearing and dismounting, improving rehabilitation efficiency and improving rehabilitation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing and example the present invention is described in further detail.
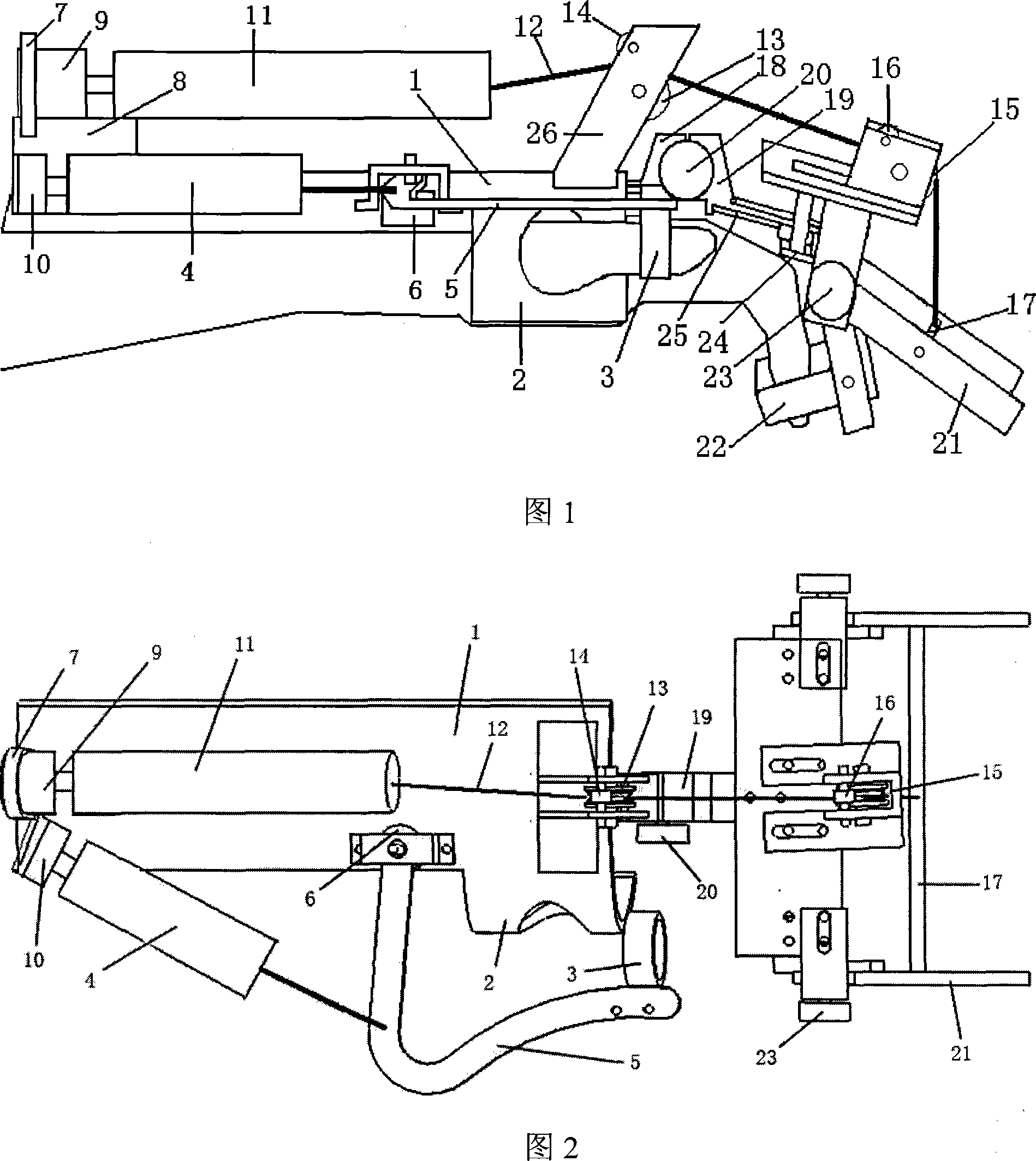
[0030] As shown in Figure 1, the structure of the wearable hand function rehabilitation robot is:
[0031] The mechanical arm 1 is used to fix the patient's arm and wrist. The first and second fixers 7 and 8 are installed at the rear end of the mechanical arm 1. The first force sensor 9 and the second force sensor 10 are used to measure the tension of the pneumatic muscle. One end of a force sensor 9 is connected to the first holder 7, and the other end is connected to the intake end of the first pneumatic muscle 11. One end of the second force sensor 10 is connected to the second holder 8, and the other end is connected to the second pneumatic muscle 4. connected to the intake port.
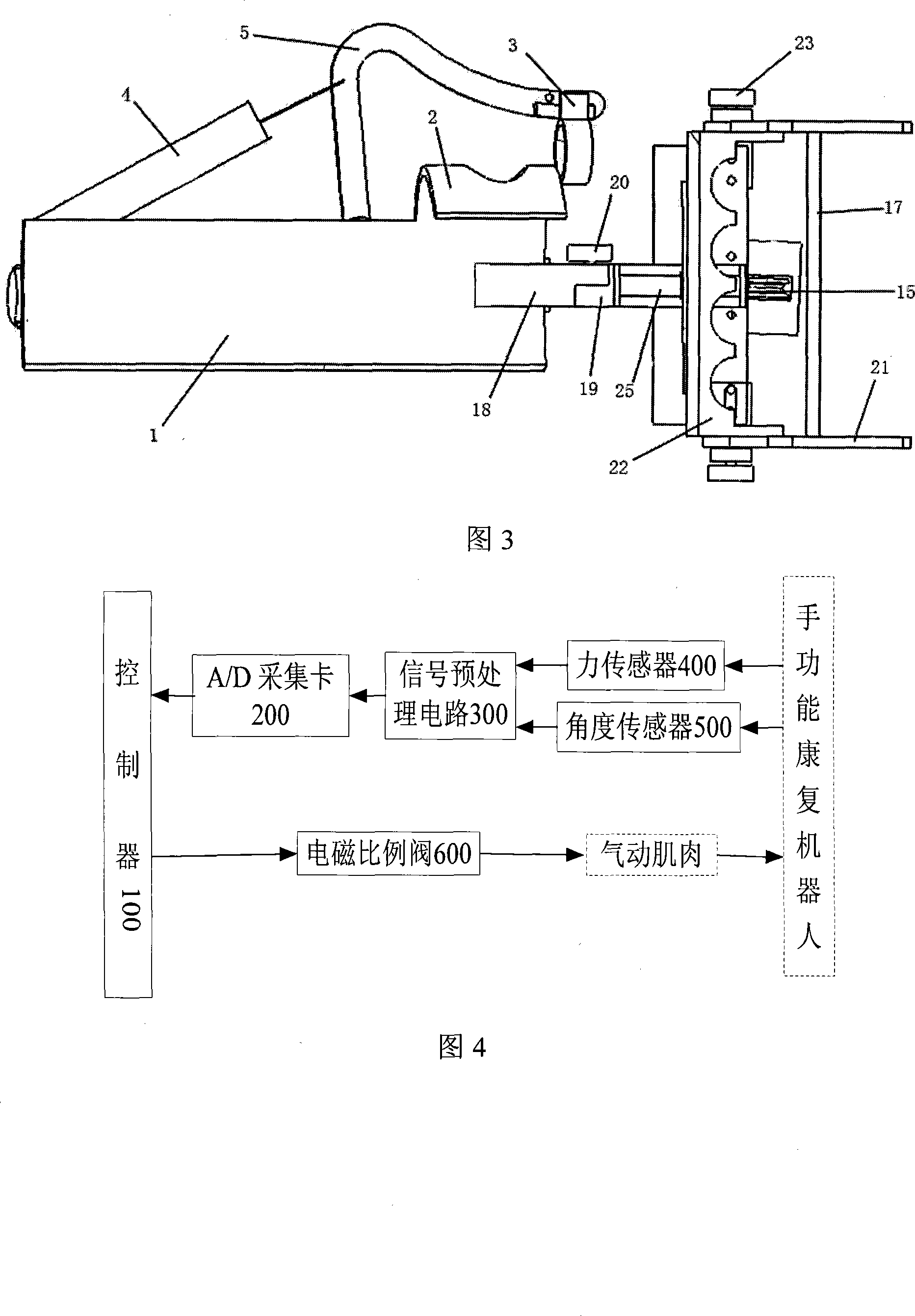
[0032] The support pulley frame 26 is installed at the front of the mechanical arm 1, the support pulley 13 and the first pressure wheel 14 are installed above, the metacarp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More