

Inverting roller type positioning mobile robot
A mobile robot, roller-type technology, applied in the field of robotics, can solve the problems of slow moving speed, difficult process, no positioning, etc., to achieve the effect of improving moving speed and efficiency, and improving moving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
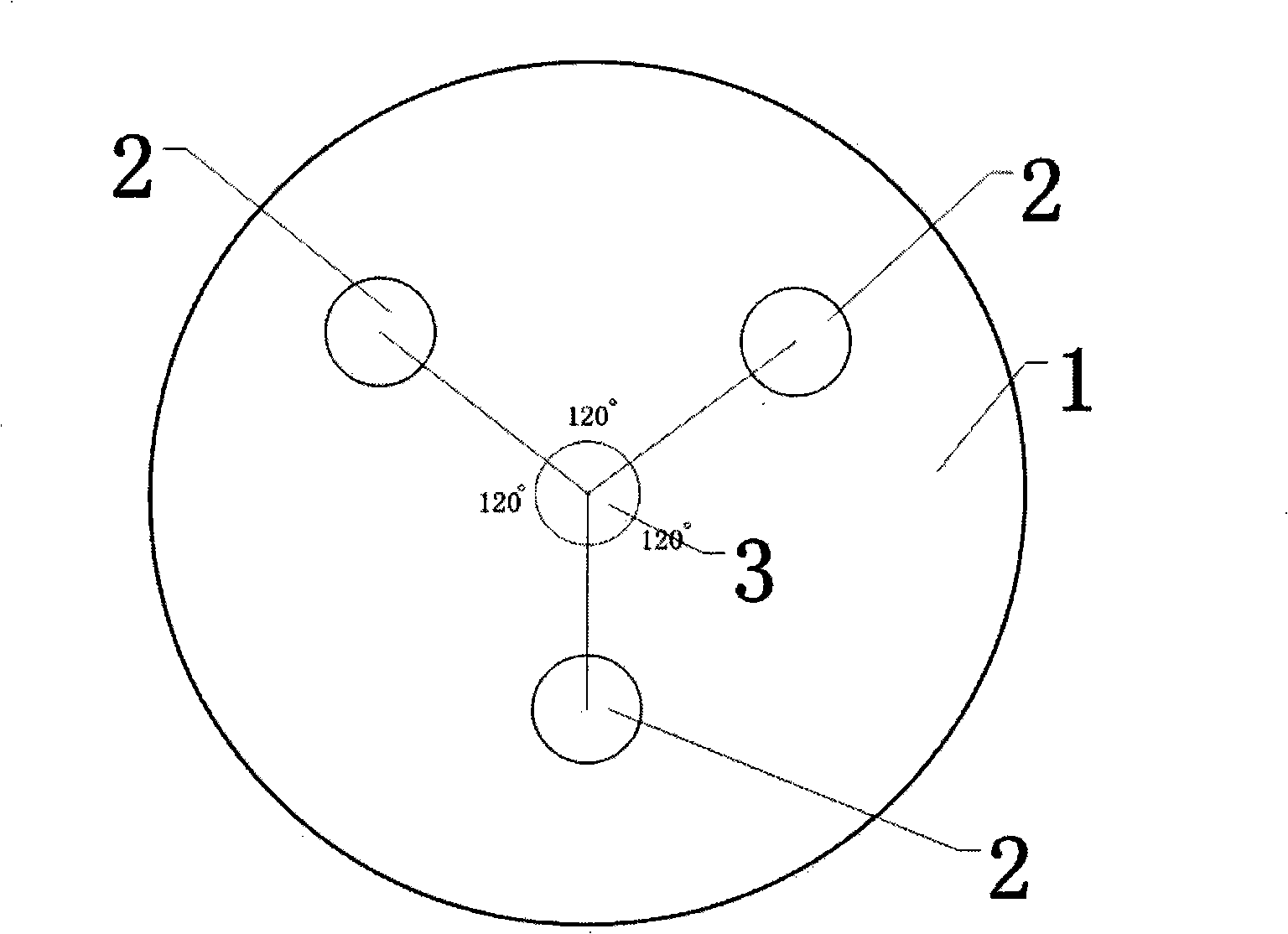
[0023] Such as figure 1 As shown, this embodiment includes: three inverted roller devices 2, a photoelectric positioning device 3, and a robot body 1, wherein: three inverted roller devices 2 are arranged on the edge of the robot body 1 at equal intervals, and the photoelectric positioning device 3 is located on the edge of the robot body 1. The bottom of the robot body 1.
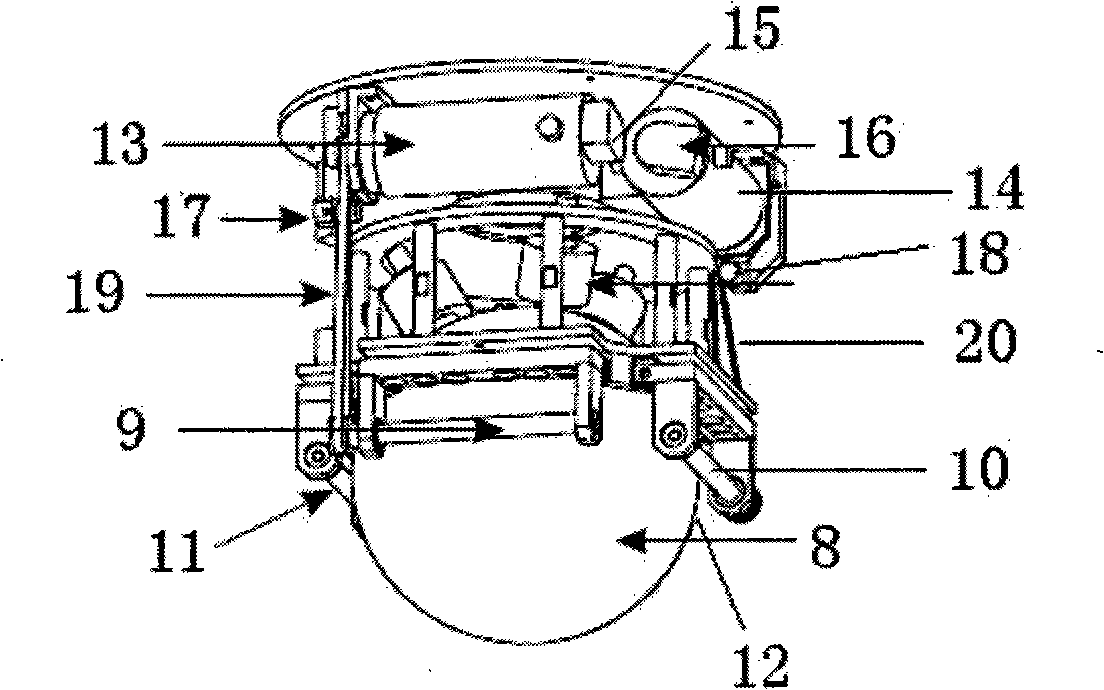
[0024] Such as image 3 As shown, the inverted roller device 2 includes a spherical roller 21, a first driving roller 9, a second driving roller 10, a first ordinary roller 11, a second ordinary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More