Map-matching method based on forecast ideology
A map matching and thinking technology, applied in the field of map matching, can solve problems such as matching errors, mismatches, and affecting the performance of navigation equipment, and achieve the effect of performance improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
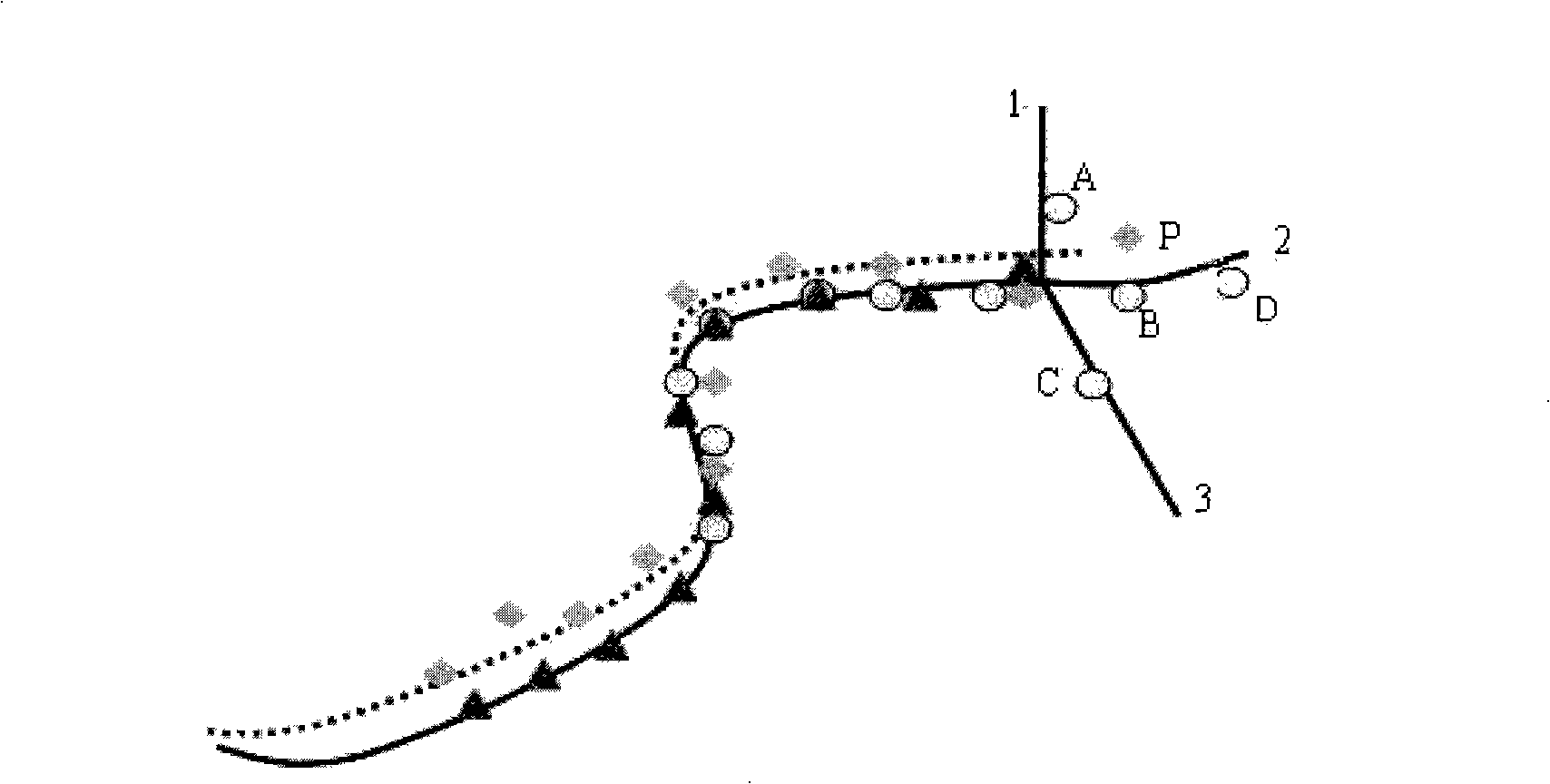
[0036] Such as figure 1 As shown, the solid line is the road, the dotted line is the positioning trajectory, the rhombus point is the positioning point, the triangle point is the matching point, and the circle point is the prediction point. At a road intersection, A, B, C, and D are predicted matching points, P is an anchor point for matching, and road 1, road 2, and road 3 are candidate matching road sections. The actual driving route of the vehicle follows the solid line of the matching point trajectory, and the current positioning point is P.
[0037] 1. Analyze the current road and geometry of the vehicle:
[0038] 1) Analyze the topological and geometric features of the vehicle's current road.
[0039] 2) According to the map information obtained in step 1), input the coordinates of each matching point (triangular point) and positioning point (rhombic point).
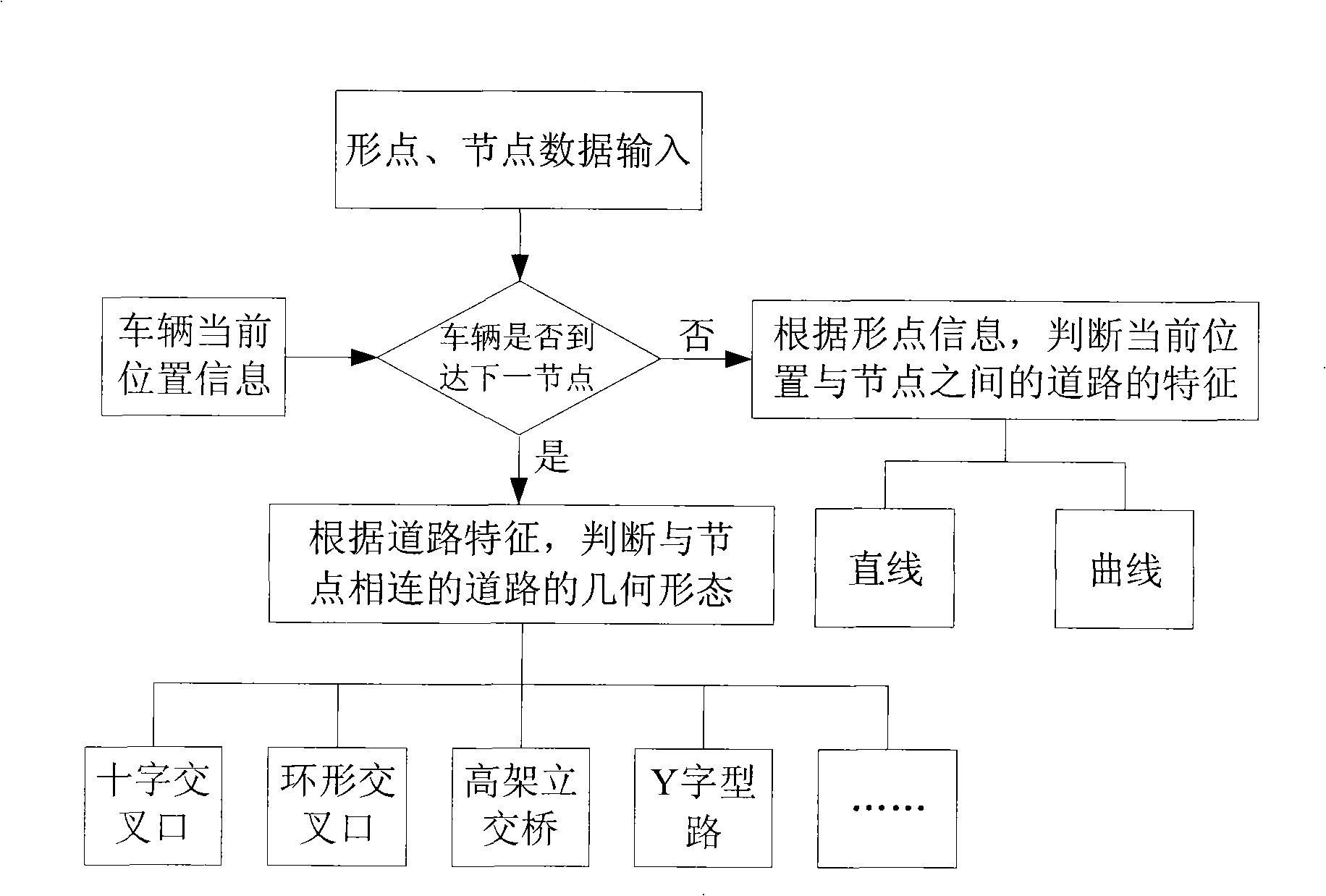
[0040] 3) According to the shape point and node data obtained in step 2), and the current position informatio...
Embodiment 2
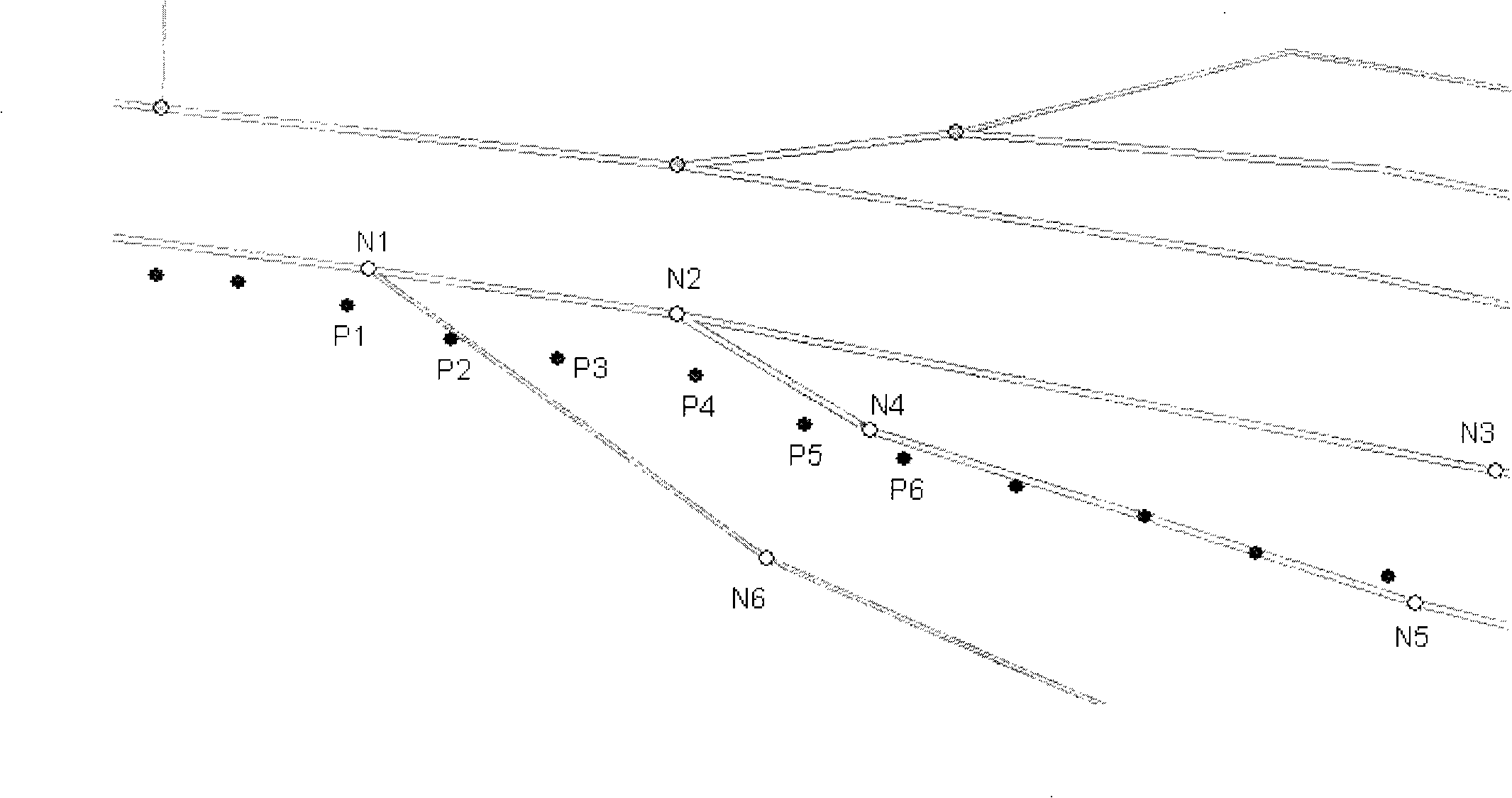
[0050] Such as figure 2 As shown, P1-P6 are positioning points, N1-N6 are nodes or shape points of the road, and the actual driving route of the car is N1→N2→N4→N5. In the actual driving process, if the conventional map matching method is used, P1, P2, P3, and P4 can be correctly matched to the road section N1_N2, but for the positioning point P5 entering the Y-shaped intersection, there will be a matching error, and P5 will be matched to the road section N2_N3 is up. By adopting the matching method involved in the present invention, P5 can be matched to road section N2_N4, that is, correct matching can be obtained, and the performance of the navigation device can be guaranteed.
[0051] According to a specific embodiment of the present invention, the prediction process is divided into two processes according to whether the device performs path planning.
[0052] 1. Analyze the geometry of the road the vehicle is currently driving on:
[0053] 1) Analyze the topological an...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap