

Positioning control apparatus and positioning control method
A technology of positioning control and control signal, applied in the direction of control using feedback, etc., can solve problems such as inability to achieve, ineffective approach, damage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
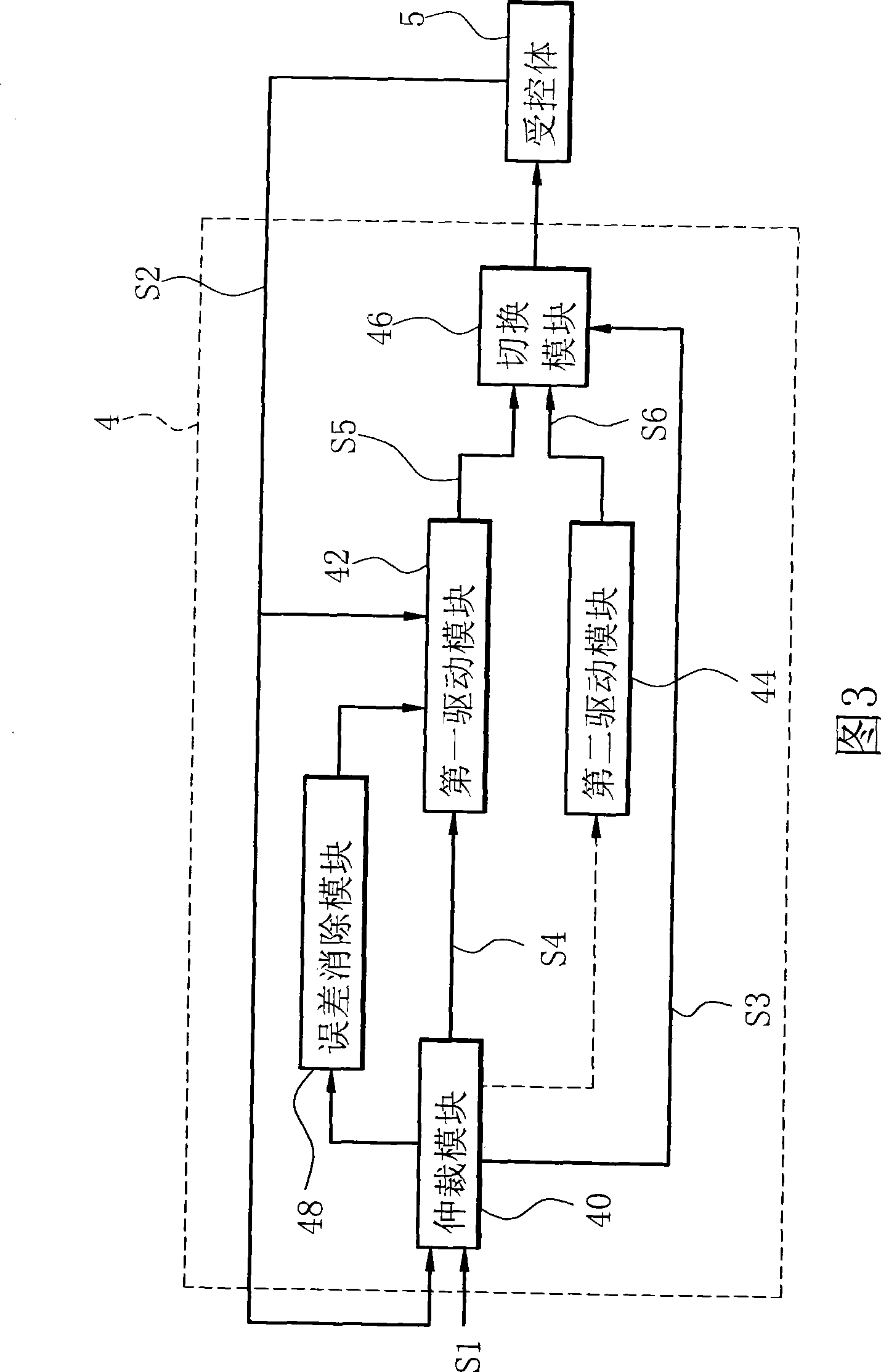
[0065] Please refer to FIG. 3 . FIG. 3 is a functional block diagram of the positioning control device of the present invention. The positioning control device 4 is connected to a controlled body 5, and as the control of the displacement and positioning of the controlled body 5, the positioning control device 4 receives a displacement command S1 from a man-machine or a sender (not marked) and obtains a displacement command S1 from the controlled body 5. A displacement feedback signal S2, and control the displacement and positioning of the controlled object 5 according to the displacement command S1 and the displacement feedback signal S2.
[0066]In FIG. 3 , the positioning control device 4 includes an arbitration module 40 , a first driving module 42 , a second driving module 44 , a switching module 46 and an error elimination module 48 . Wherein, the arbitration module 40 has a dead point default value (not marked), and the arbitration module 40 also obtains the displacement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More