

Three-dimensional reconstruction method based on fringe photograph collection of same scene
A three-dimensional reconstruction and scene technology, which is applied in 2D image generation, image data processing, instruments, etc., can solve problems such as high time overhead, unreliable basic matrix, and return time overhead, and achieves improved stability and accuracy. Reliable camera pose estimation, the effect of overcoming accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
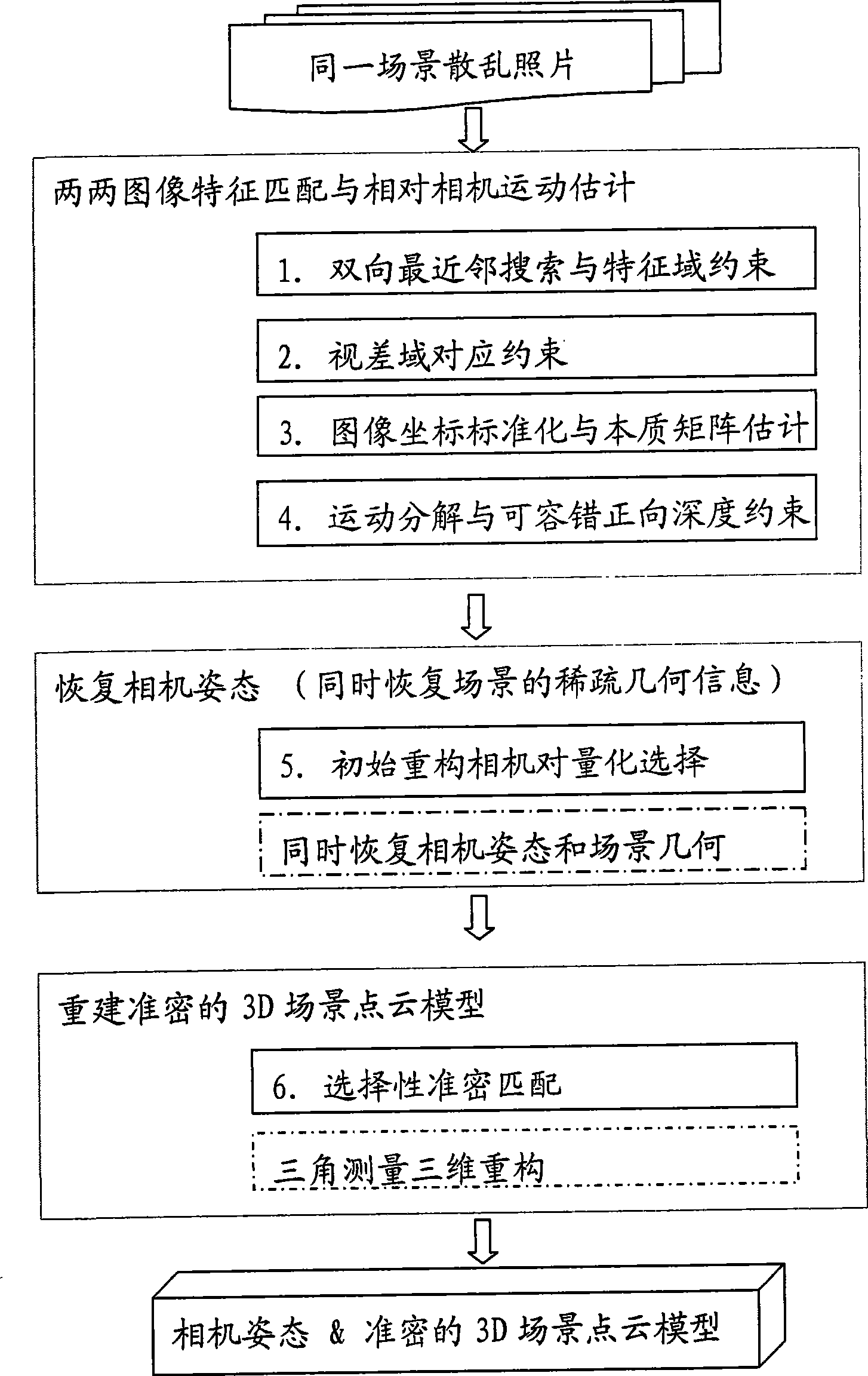
[0031] Such as figure 1 Shown, concrete steps of the present invention are as follows (the step in the dotted line frame is prior art):
[0032] 1. Perform bidirectional nearest neighbor search and feature domain constraints on each two images to obtain candidate correspondences.
[0033] The advantage of bidirectional nearest neighbor search and feature domain constraints is that when pairwise image features are matched, more potential matches are searched in the forward direction, and constraints are strengthened in the reverse direction, which can not only obtain more candidate correspondences, but also improve the accuracy rate. The method for:
[0034] For two images (I 1 , I 2 ), for each feature point p on I1 i , find it in I 2 Candidate corresponding points on , the steps are as follows:
[0035] In the first step, the user sets the forward and reverse feature domain constraint ratios as rt 1 , rt 2 ;
[0036] In the second step, in I 2 look for p i k = 5 ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More