

Automatic obstacle-avoiding method of robot cleaner and control method thereof
A robot vacuum cleaner, automatic obstacle avoidance technology, applied in two-dimensional position/channel control, installation of electrical equipment, etc., can solve the problems of complex algorithm programs, easy to be affected by the environment, and high component prices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
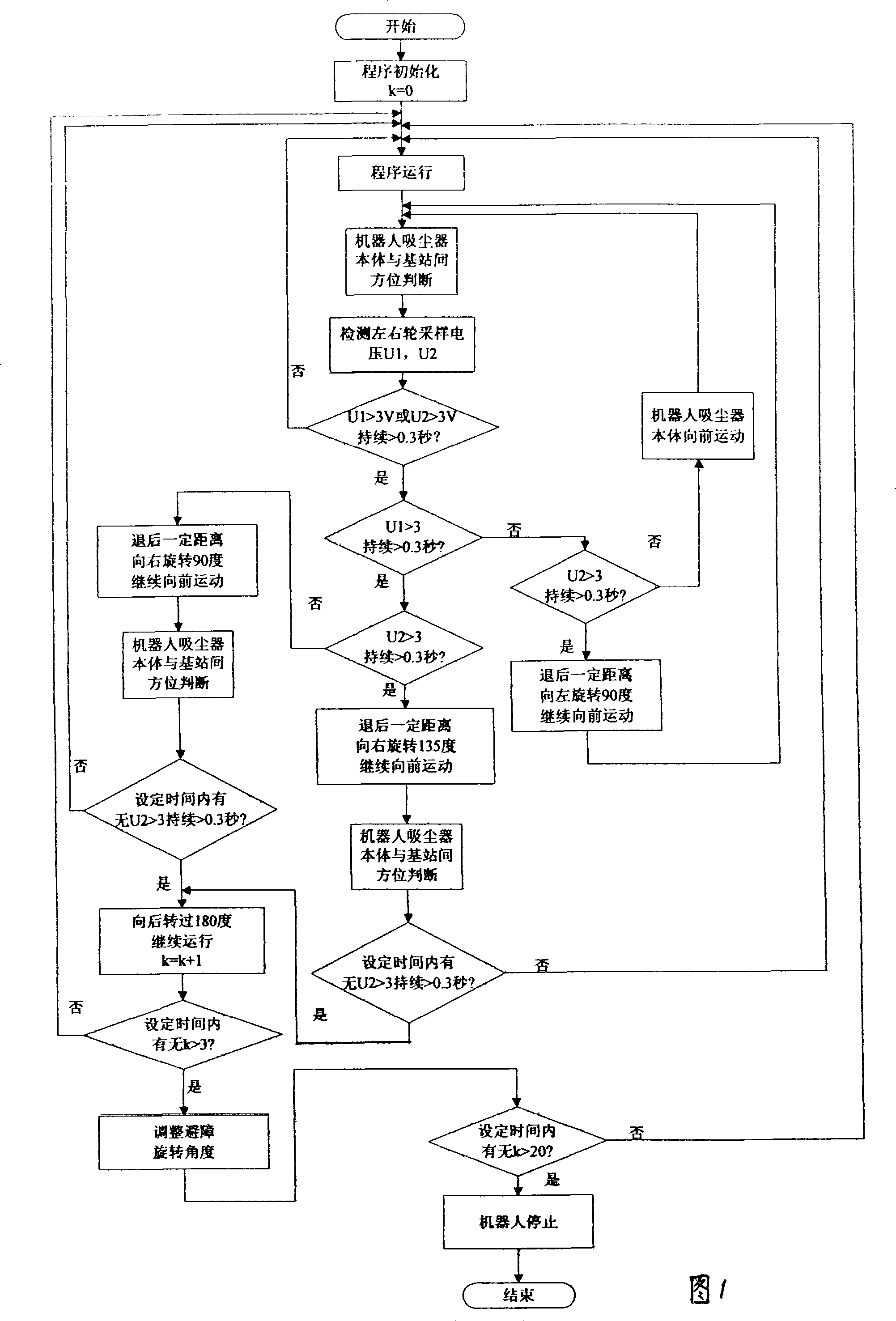
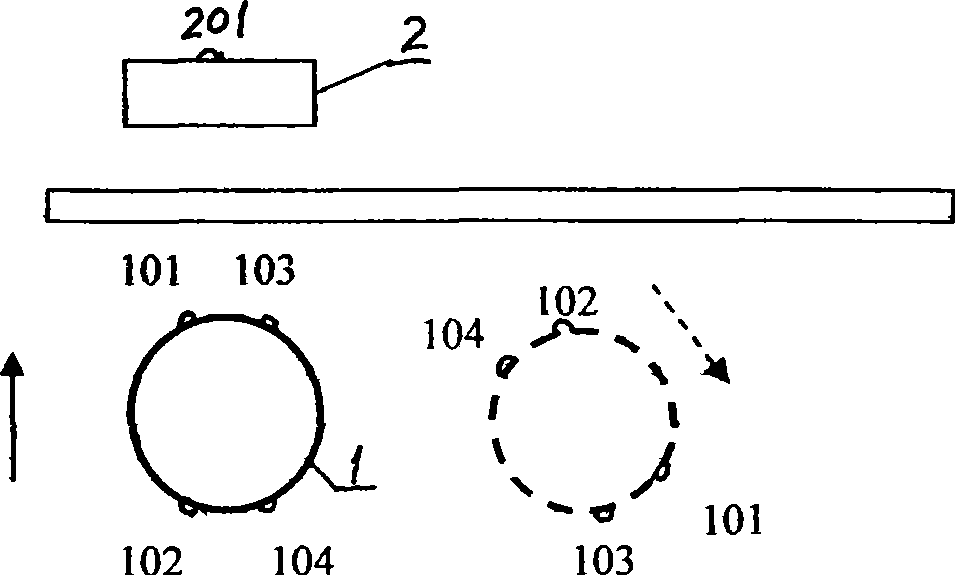
[0016] Referring to Fig. 1 and Fig. 2, a kind of robot vacuum cleaner automatic obstacle avoidance of the present invention and its control method, comprise dust-absorbing body 1, base station 2 and control circuit, dust-absorbing body 1 is provided with left and right wheels, dust-absorbing body 1 After automatic vacuuming, return to the base station 2 for charging and vacuuming. The inventive point is that: the top of the base station 2 is provided with an infrared emitter 201, which continuously emits infrared waves to the vacuum body 1, and four infrared transmitters are arranged on the upper part of the vacuum body 1. The receivers 101 , 102 , 103 , 104 receive infrared communication signals from the base station 2 .
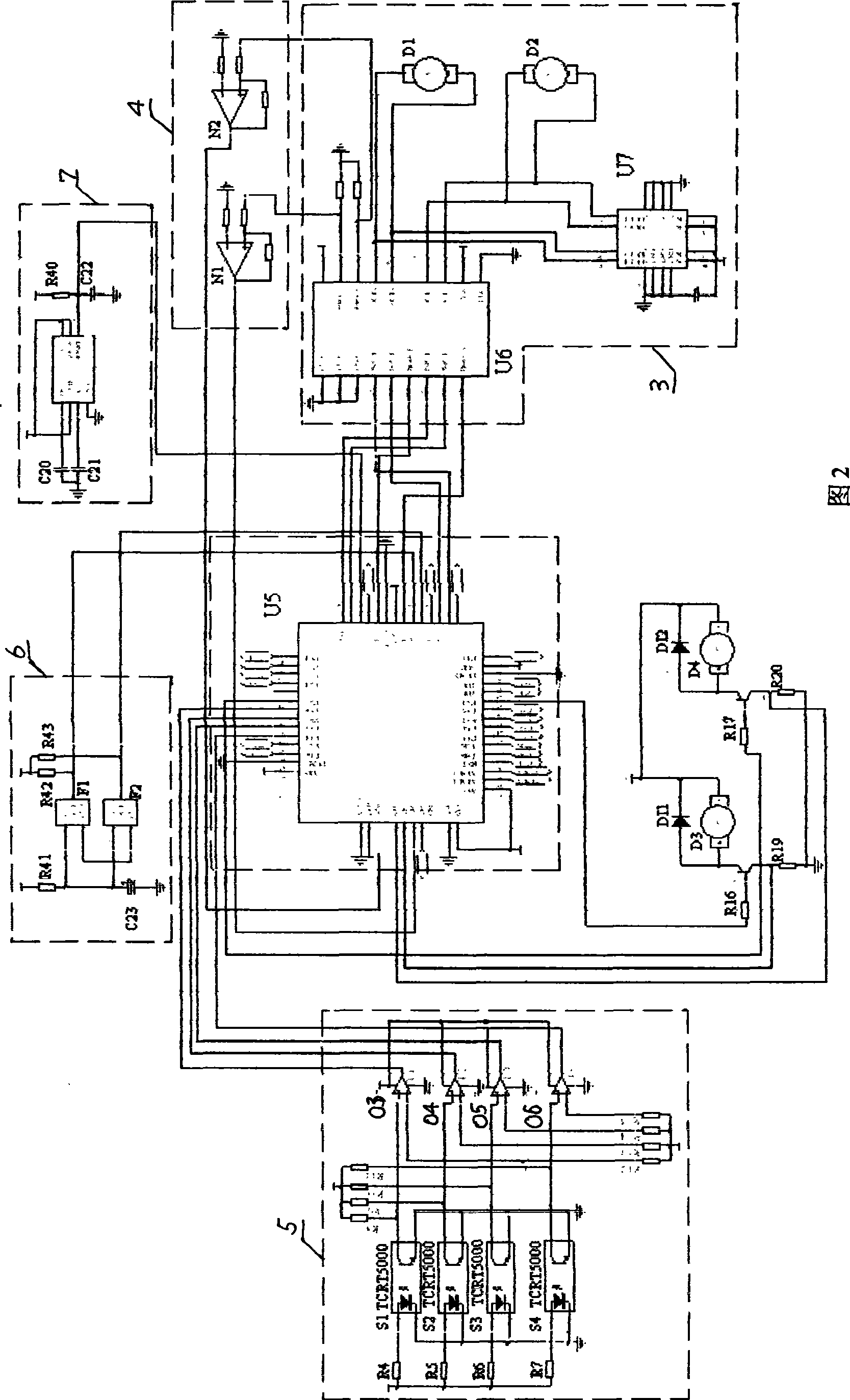
[0017] The control circuit includes a single-chip microcomputer U5, a driving circuit 3, a current feedback circuit 4, an anti-falling circuit 5, an infrared receiving circuit 6, and a voltage monitoring circuit 7. The driving circuit 3 is connected with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More