

Three-dimensional composite flexible joint
A flexible joint and composite technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of miniaturization difficulties, small stroke and large volume of pneumatic bellows, and achieve good market prospects, stable movements and good adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific examples.
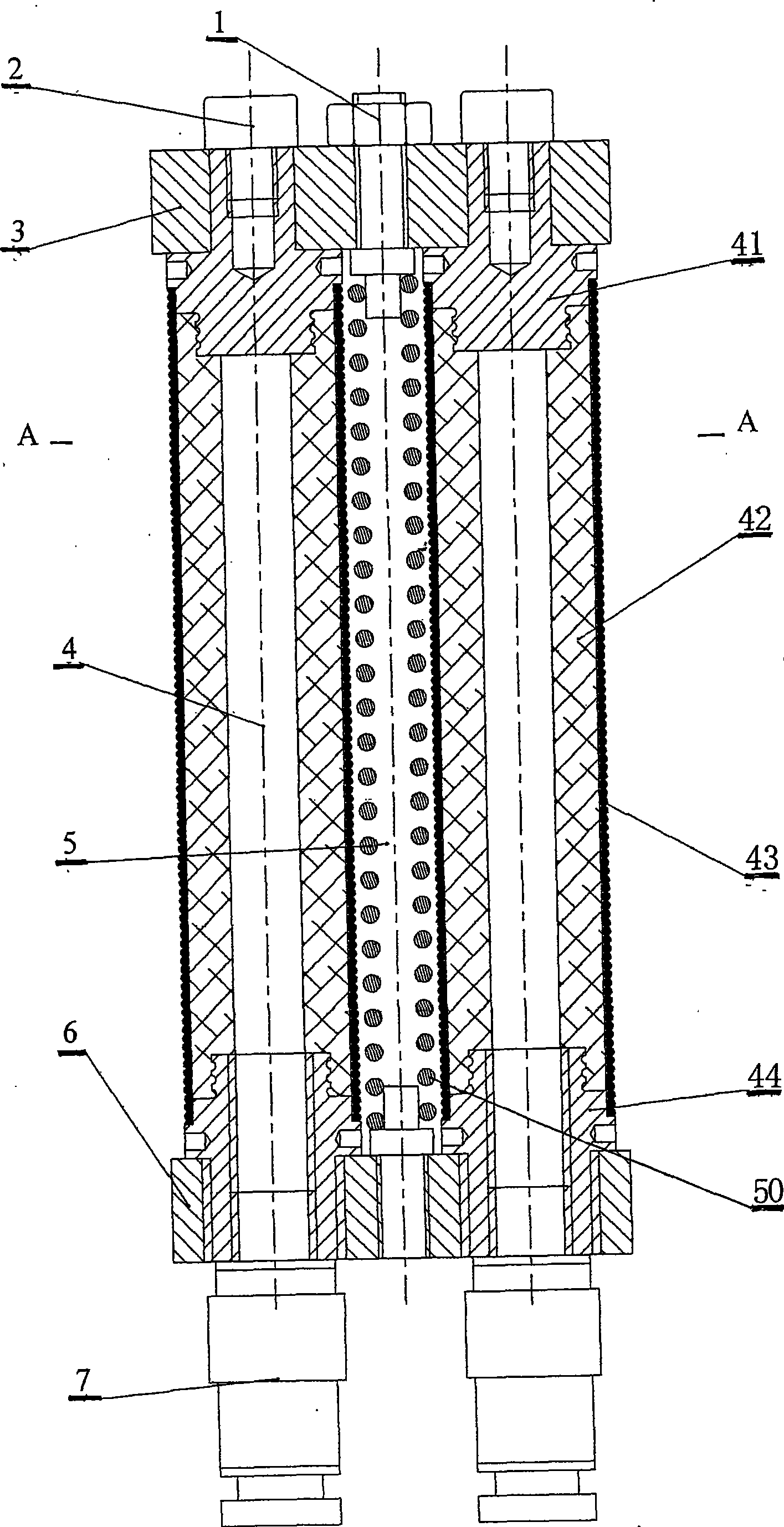
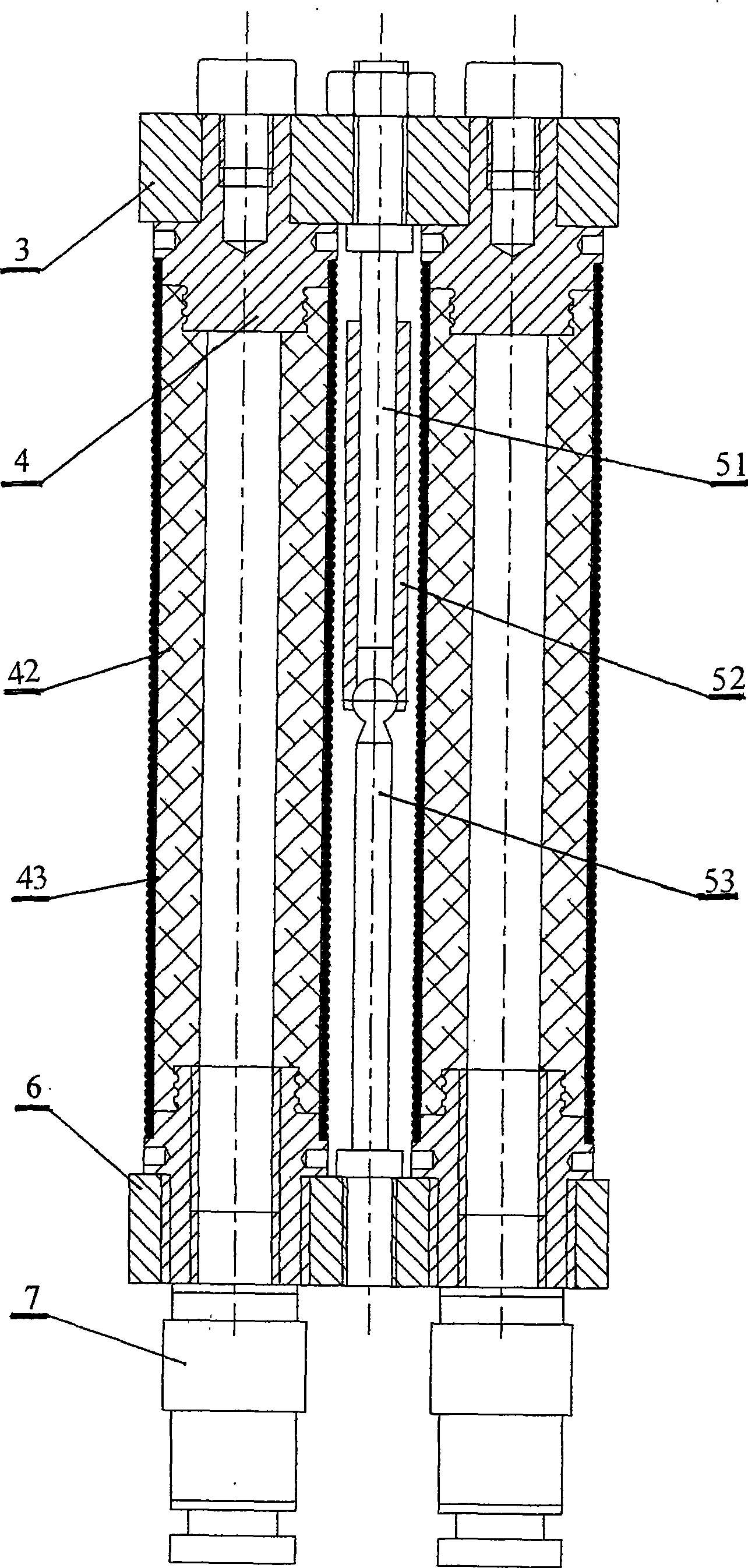
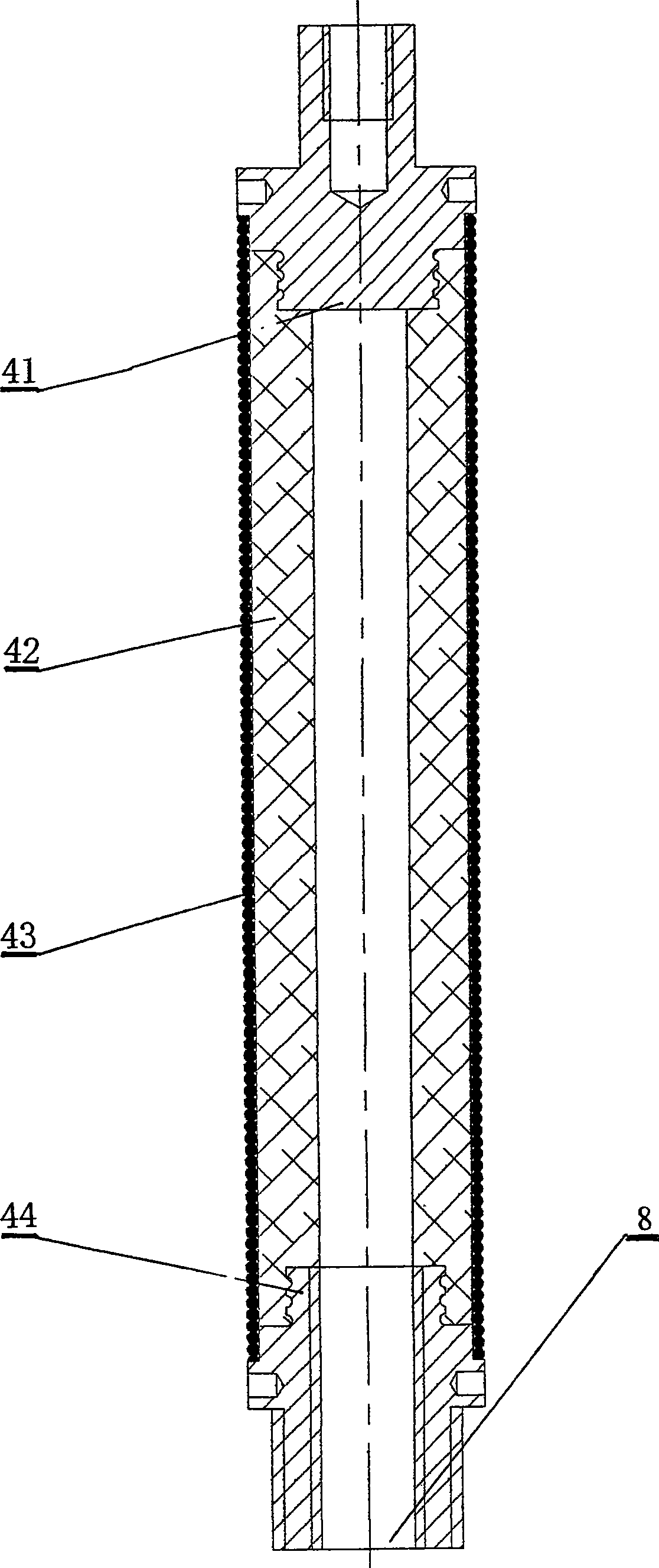
[0015] The present invention is composed of an elongated artificial muscle 4, a central skeleton 5 and joint flanges 3, 6; the skeleton 5 is located on the central axis of the joint, and its two ends are fixedly connected with the joint flanges 3, 6; Rigid spring skeleton or multi-dimensional skeleton; the joint drive is completed by several elongated artificial muscles 4, which are arranged in a ring along the center of the joint, and the two ends of each elongated artificial muscle 4 are connected to the upper and lower joint flanges 3, 6 connections. Flesh and flesh are integrated, and there are decorations on the outside.
[0016] figure 1 It is a schematic diagram of the spring skeleton flexible joint structure composed of four elongated artificial muscles. In the figure, there are nuts 1, screws 2, upper flange 3, elongated artif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More