

Soccer robot projection recognition algorithm
A football robot and recognition algorithm technology, applied in the field of football robot projection recognition algorithm, can solve the problems of increasing search time, long spiral search calculation time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
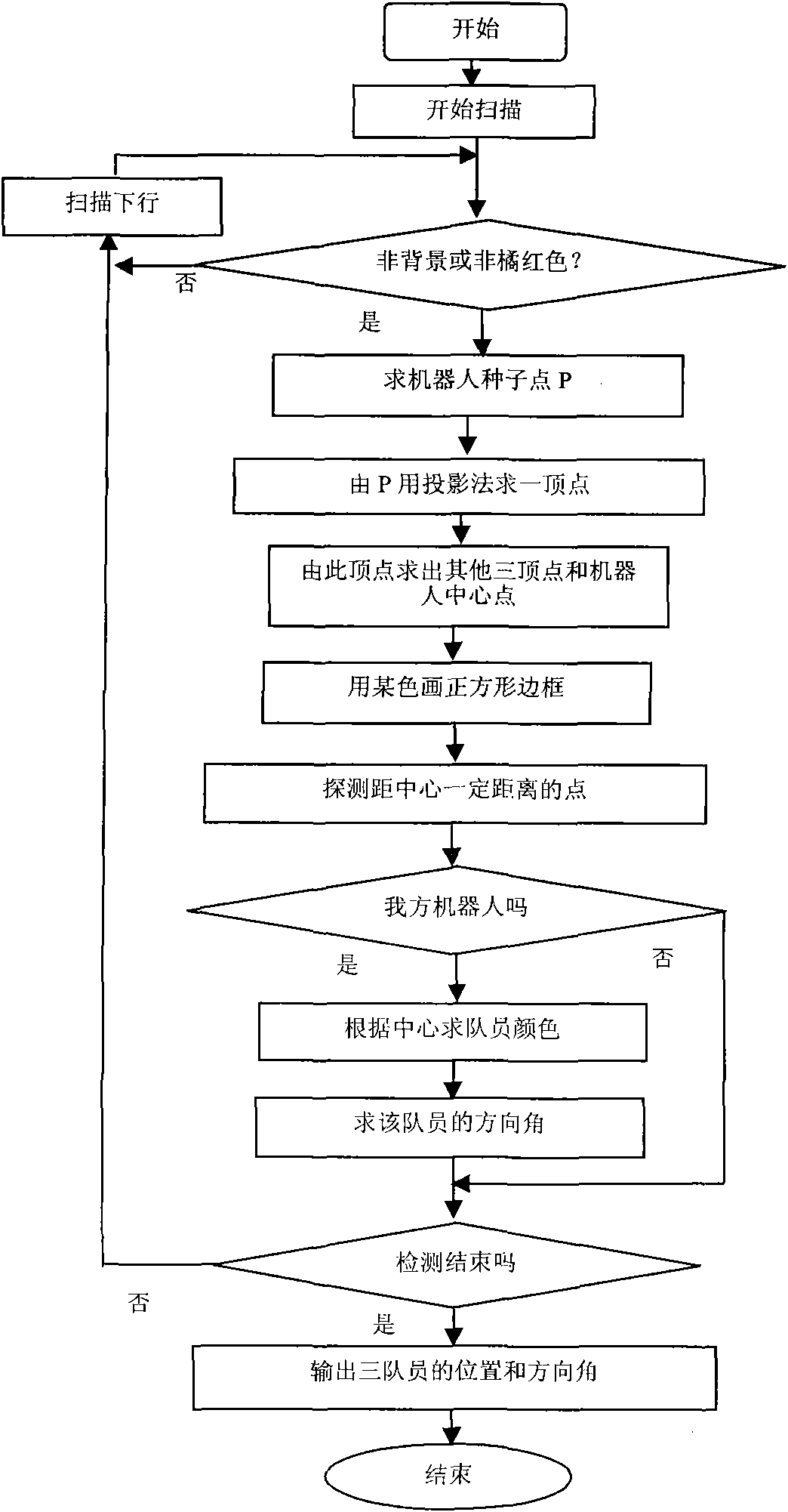
[0020] refer to figure 1 As shown, the first frame robot image video tracking submodule of the projection recognition algorithm of the present invention first searches for non-background color or non-orange red by scanning lines, and finds the seed point P after finding it; finds the robot square by the projection method of point P From this vertex, use the projection method to find the other four vertices and their centers of the robot's square; calculate and identify the robot's category and direction information; finally output the position and direction information of our three robot team members.
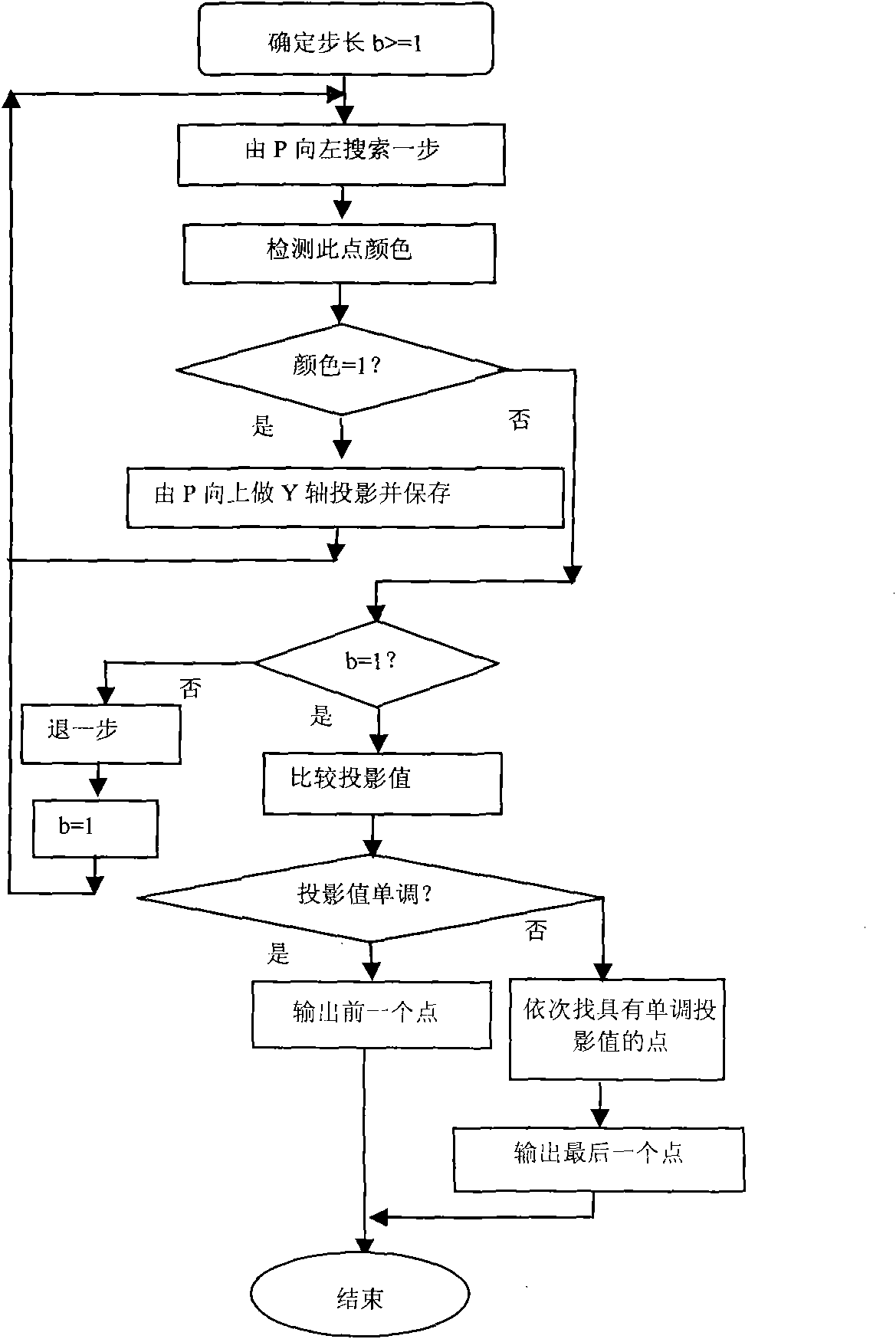
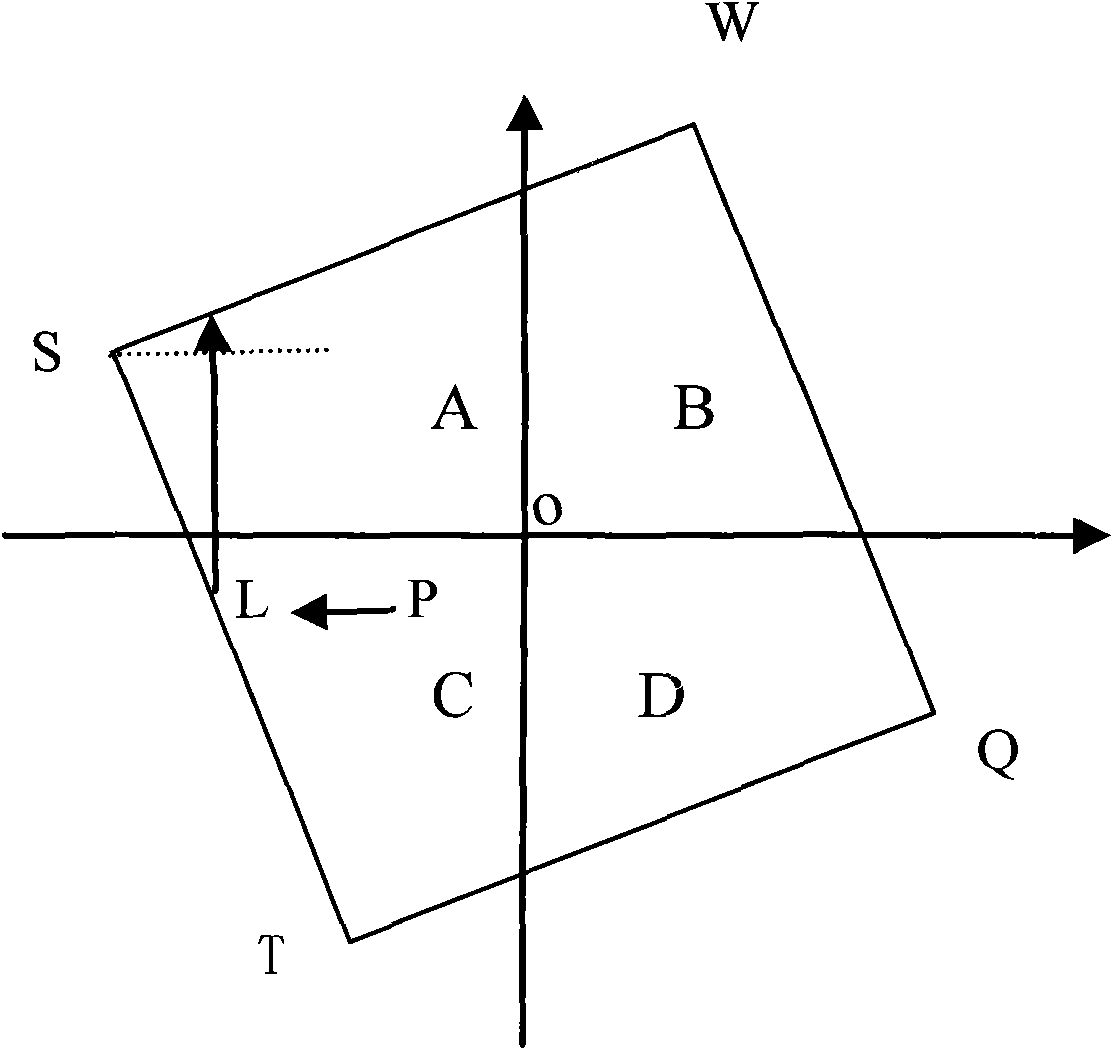
[0021] refer to figure 2 As shown, this figure describes the search left boundary intersection submodule in the process of finding the robot square vertex according to the present invention, and the goal is to find the intersection point between the current scan line and the robot's left boundary. According to the search step size b (b>=1), search to the left and judge the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More