Method for calibrating structure light vision transducer based on one-dimensional target drone
A technology of visual sensor and calibration method, which is applied in the direction of instruments, optical devices, measuring devices, etc., and can solve the problem of not being able to calibrate a single camera
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
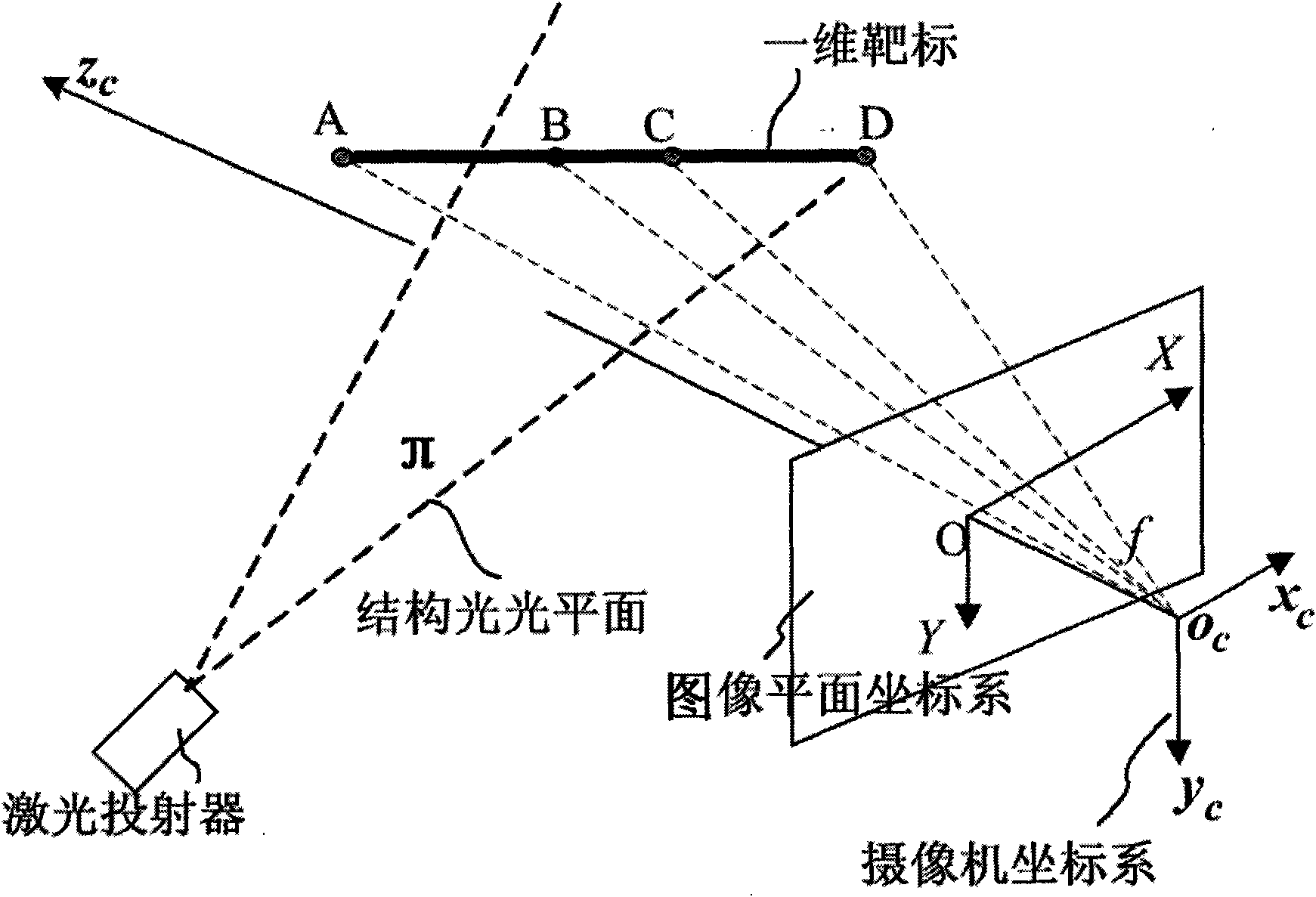
[0040] Before introducing the present invention, at first, see figure 1 The schematic diagram of the structured light vision sensor model is shown to illustrate the mathematical model of the structured light vision sensor. figure 1 shows the geometric structure relationship of the structured light three-dimensional visual perspective projection model, where O c -x c the y c z c (for the right-hand system) is the camera coordinate system, o i -XY is the image plane coordinate system, π is the structured light plane. A point in the camera coordinate system (x c ,y c ,z c ) and the point (X, Y) of the image plane coordinate system can be expressed by the following formula:
[0041] ρ · X Y 1 = F · x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More