

Wheel assembly with integration of independent driving, steering, suspending and braking
An independent drive and wheel technology, applied in the direction of brakes, steering rods, steering mechanisms, etc., can solve the problems of complex structure, increased difficulty, and the difficulty of complete sealing of the steering driven bevel gear.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
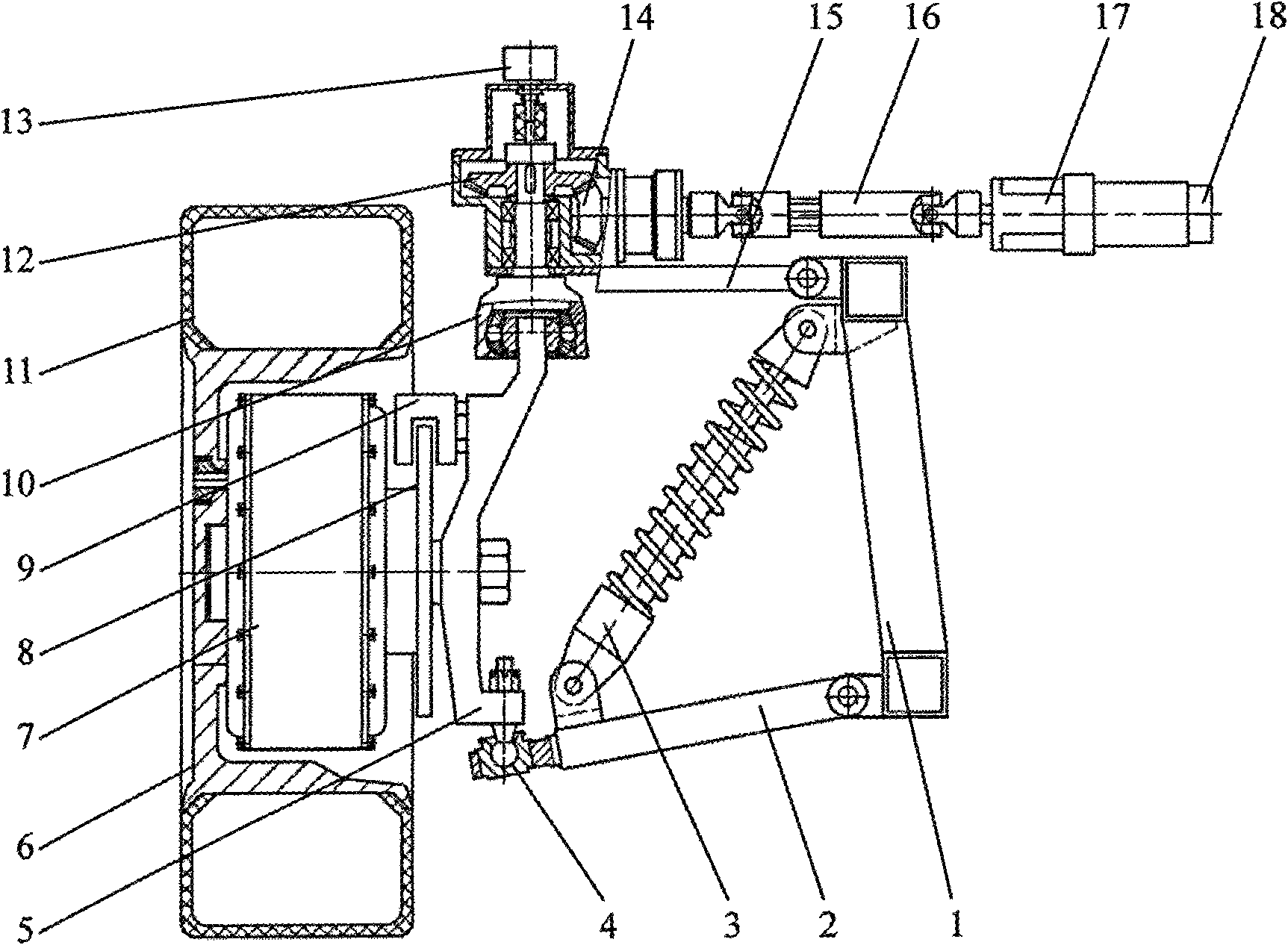
[0022] The integrated wheel assembly of the present invention is as figure 1 As shown, it includes four parts: wheel driving device, suspension device, steering device and braking device. The specific structure of each part is as follows.
[0023] The driving device is made up of rim 6, tire 11 and hub motor 7. A tire 11 is mounted on the rim 6, which together form the wheel. The rim 6 is fixed together with the outer rotor of the hub motor 7, and the fixed shaft (stator) of the hub motor 7 is rigidly connected with the steering knuckle 5 in the suspension. When a certain drive current is given to the hub motor 7, the outer rotor of the motor drives the entire wheel to move.
[0024] Suspension device is made up of upper swing arm 15, constant velocity universal joint 10, steering knuckle 5, ball joint 4, lower swing arm 2 and shock absorber 3. The upper end of the steering knuckle 5 is rigidly connected with the inner casing of the constant velocity universal joint 10, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More