

Method and device for controlling robot operations
A robot and joint technology, applied in the field of robotics, can solve problems affecting robot motion planning and trajectory control, robot structure cannot be solved, and takes a long time, so as to achieve increased speed and control the speed of robot operation, and reduce time-consuming , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
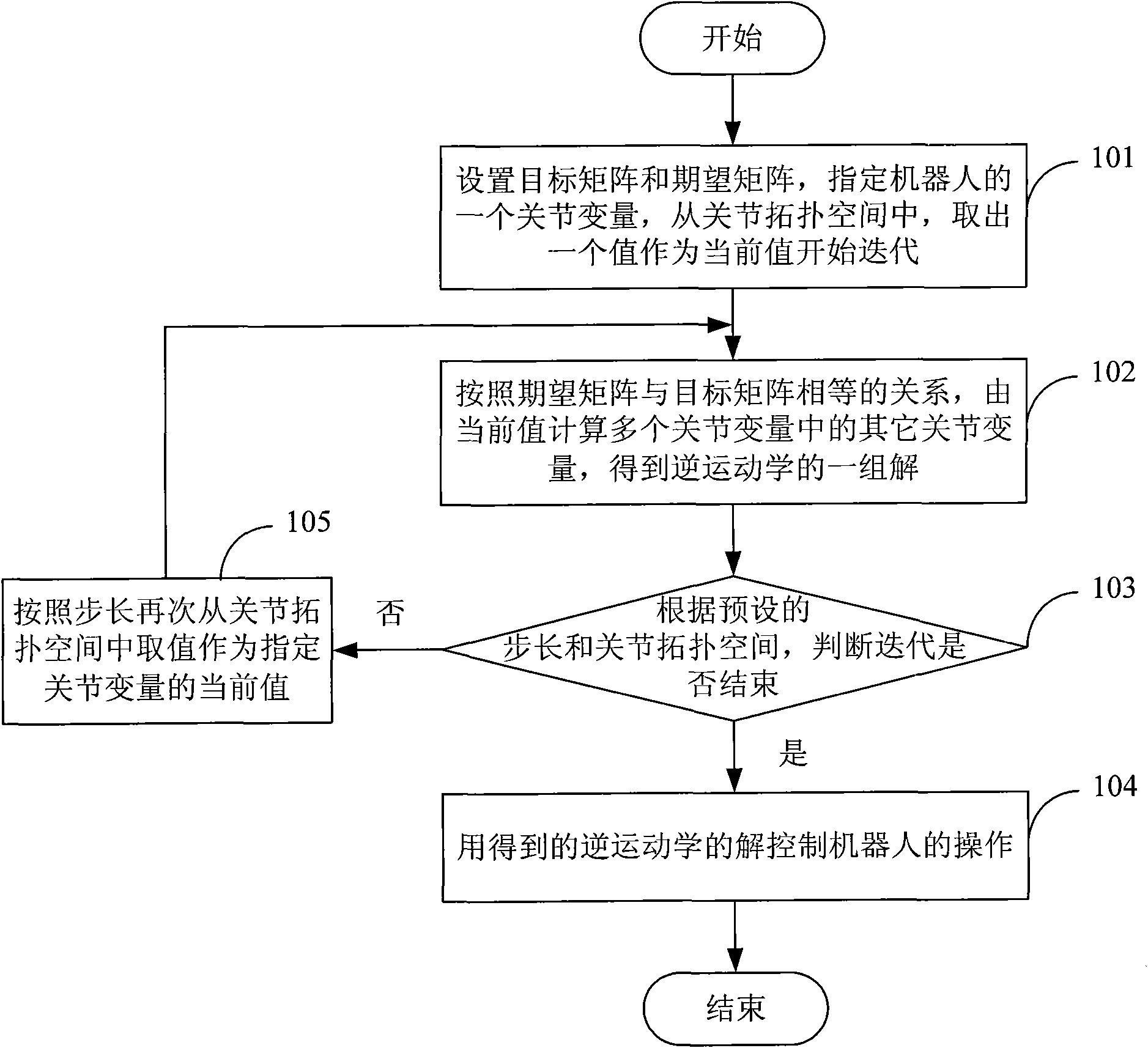
[0040] see figure 1 , an embodiment of the present invention provides a method for controlling the operation of a robot, including:
[0041] Step 101: Use the kinematics equation of the robot as the target matrix, and set the desired matrix according to the degrees of freedom of the robot, specify a joint variable among multiple joint variables of the robot, and take a value from the joint topological space as the specified joint variable Current value, start iteration;
[0042] Step 102: According to the relationship between the expected matrix and the target matrix being equal, calculate other joint variables among the multiple joint variables according to the current value of the specified joint variable, and use all the currently ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More