Mecanum wheel all-directional moving vehicle and driving method thereof
A technology of all-round movement and rotation direction, applied in the field of vehicle engineering, can solve problems such as increased cost, complex mechanical structure, and reduced reliability, and achieve the effects of reducing manufacturing and maintenance costs, simplifying the control system, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
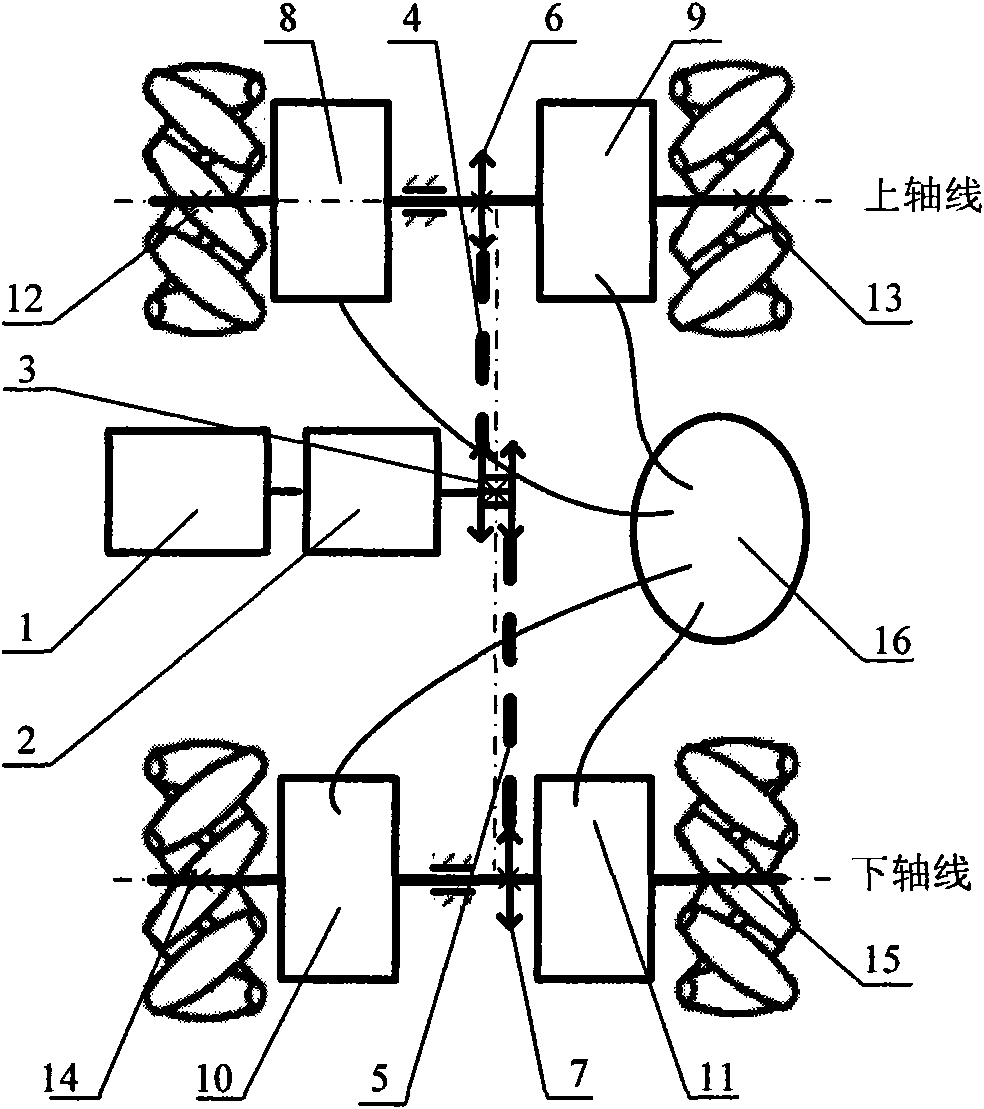
[0040] An all-round mobile vehicle with mecanum wheels, comprising: a frame, on which:
[0041] The first mecanum wheel 12, the second mecanum wheel 13, the third mecanum wheel 14, the fourth mecanum wheel 15;
[0042] A rotary power source 1 for simultaneously driving the first mecanum wheel 12, the second mecanum wheel 13, the third mecanum wheel 14 and the fourth mecanum wheel 15 through a transmission mechanism;
[0043] The first commutator 8, the second commutator 9, the third commutator 10, and the fourth commutator 11, the first commutator 8 is located between the rotary power source 1 and the first mecanum wheel 12, used to change the rotation direction of the first mecanum wheel 12; the second commutator 9 is set between the rotary power source 1 and the second mecanum wheel 13, used to change the second mecanum wheel 13 rotation direction; the third commutator 10 is located between the rotary power source 1 and the third mecanum wheel 14, for changing the rotation ...
Embodiment 2
[0051] A driving method of a mecanum wheel omnidirectional mobile vehicle:
[0052] The driving power output by a rotary power source 1, the driving power is transmitted to the first commutator 8, the second commutator 9, the third commutator 10, the fourth commutator 11 through the driving mechanism, and the first commutator 8, the second commutator 9, the third commutator 10, and the fourth commutator 11 respectively transmit the obtained driving power to the first mecanum wheel omni-directional mobile vehicle according to the output direction determined by the controller 16. One mecanum wheel 12, the second mecanum wheel 13, the third mecanum wheel 14, and the fourth mecanum wheel 15.
[0053] The commutator and drive mechanism can adopt the specific method described in Embodiment 1, and the rotary power source 1 can specifically adopt a motor.
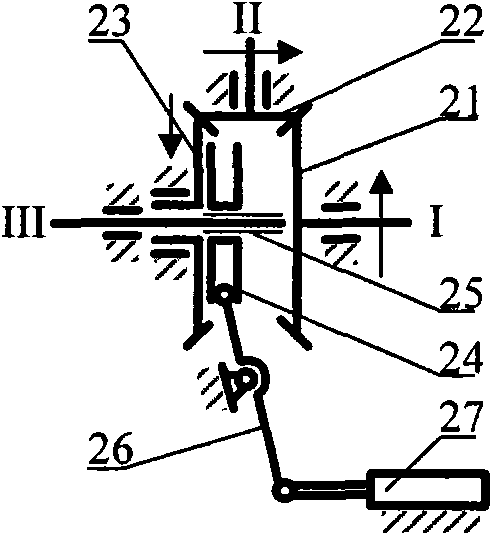
[0054] refer to figure 1 , The block diagram of the system structure when the input and output shafts of the commutator are co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com