

Active controllable type capsule endoscope robot system
A robotic system and capsule endoscopy technology, applied in the fields of electromechanical technology and bionics, can solve the problems that earthworm-like robots are difficult to meet intestinal detection, and achieve the effects of short detection time, simple control and low cost
Inactive Publication Date: 2010-12-01
SHANGHAI JIAO TONG UNIV
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, since the forward power provided by the earthworm-like robot itself is closely related to the friction surface, that is, there is a limit friction force during the forward process, a large number of experimental results have confirmed that the earthworm-like robot is difficult to meet the needs of intestinal detection.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
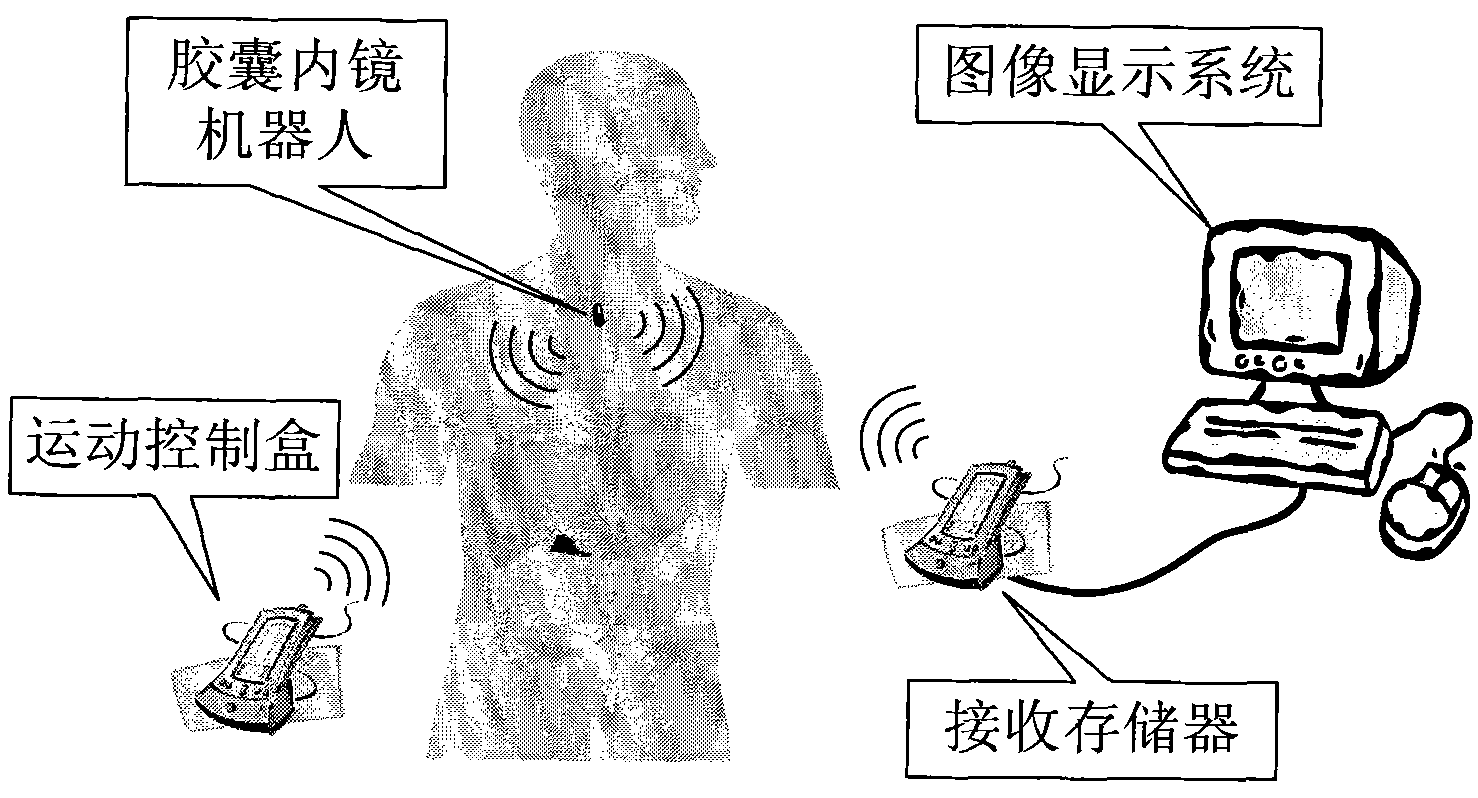
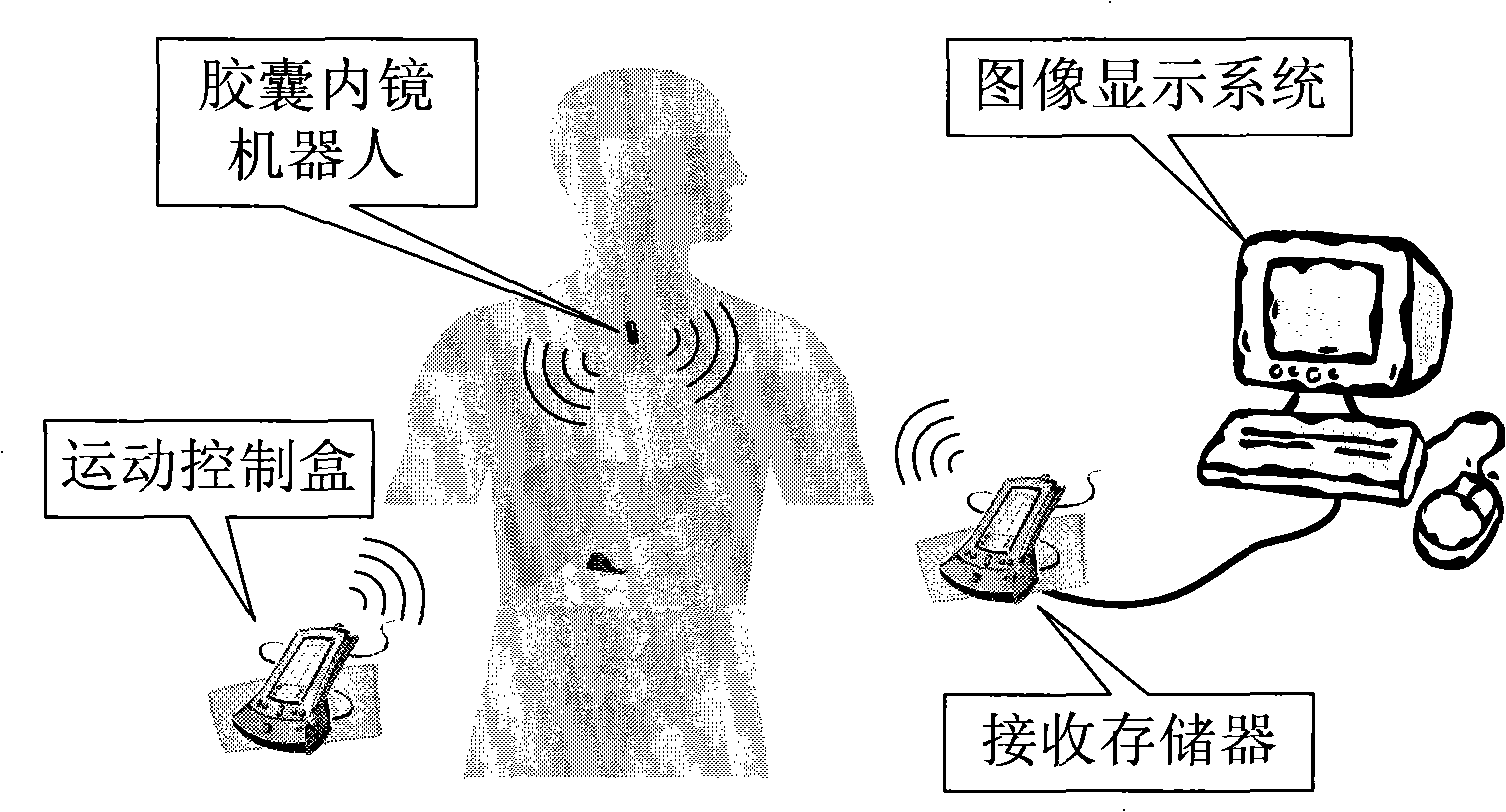
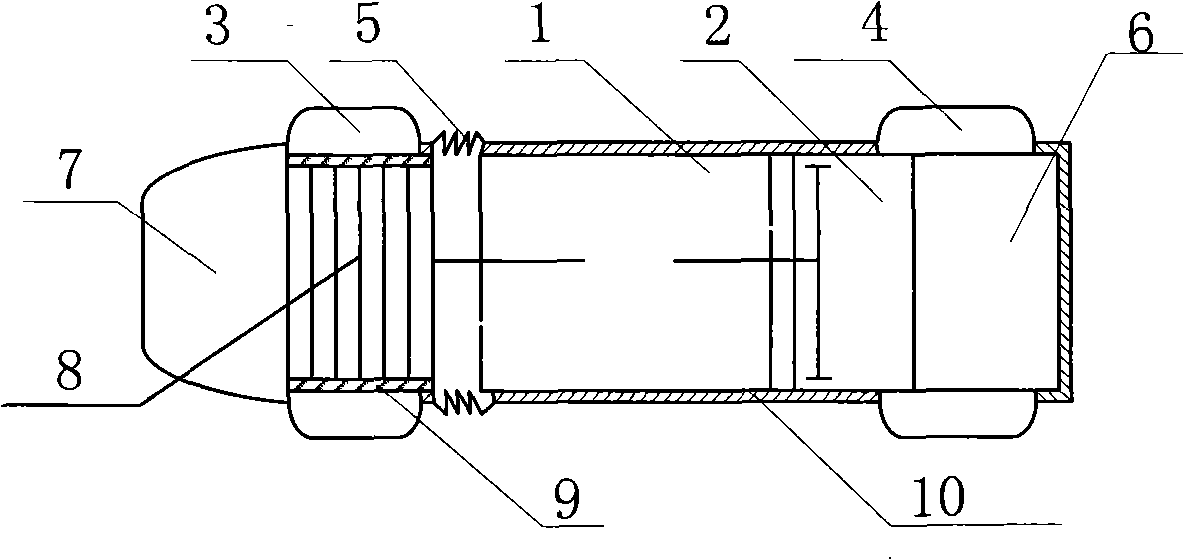
The invention relates to an active controllable type capsule endoscope robot system comprising a capsule endoscope robot, a receiving memory, a motion control box and an image display system. A driving mechanism of the capsule endoscope robot generates the radial expansion and contraction of an oil bag and the extension and contraction of a capsule by a direct-current motor, a double-shaft multiplexing speed reducer and a geometer motion distribution mechanism and realizes progression and retrogression by matching according to a certain time sequence; after the capsule endoscope robot enters the gastrointestinal tract of a human body by oral administration, the capsule endoscope robot shoots the image information of each position of the gastrointestinal tract at real time by the self geometer creeping and transmits the image information outside the body in a wireless mode. In a part outside the body, the receiving memory is used for receiving and storing image data transmitted by the capsule endoscope robot in a wireless way; the motion control box controls the progression, the retrogression or the stop of the capsule endoscope robot in a wireless transmission mode so as to repeatedly observe a questionable position in the gastrointestinal tract; and the image display system reads and processes the image data recorded in the receiving memory at real time by a computer so as tobe observed and diagnosed by a doctor.
Description
Active Controllable Capsule Endoscopy Robotic System technical field The invention relates to an actively controllable capsule endoscopic robot system, in particular to the bionic motion control of an inchworm under a single motor, and belongs to the fields of mechanical, electrical technology and bionics. Background technique It is reported that 80% of gastric cancers are already in advanced stage when they are discovered, and more than 90% of gastrointestinal malignant tumors are transformed from benign polyps. Late detection of malignant tumors and missed the best opportunity for treatment is one of the important reasons for the high mortality rate. Therefore, early detection and early treatment are the key to reducing the mortality rate of gastrointestinal malignancies. Gastrointestinal endoscopy, as an important method of gastrointestinal examination, has a high detection rate and multiple functions, but it is traumatic, painful for the patient, and difficult for th...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): A61B1/00A61B5/07
Inventor颜国正李传国王坤东王莉娟钱春阳
OwnerSHANGHAI JIAO TONG UNIV