

Processing control method of industrial robot based on G code conversion method
A technology of industrial robots and control methods, applied in the direction of digital control, electrical program control, etc., can solve problems such as poor practicability and achieve good practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
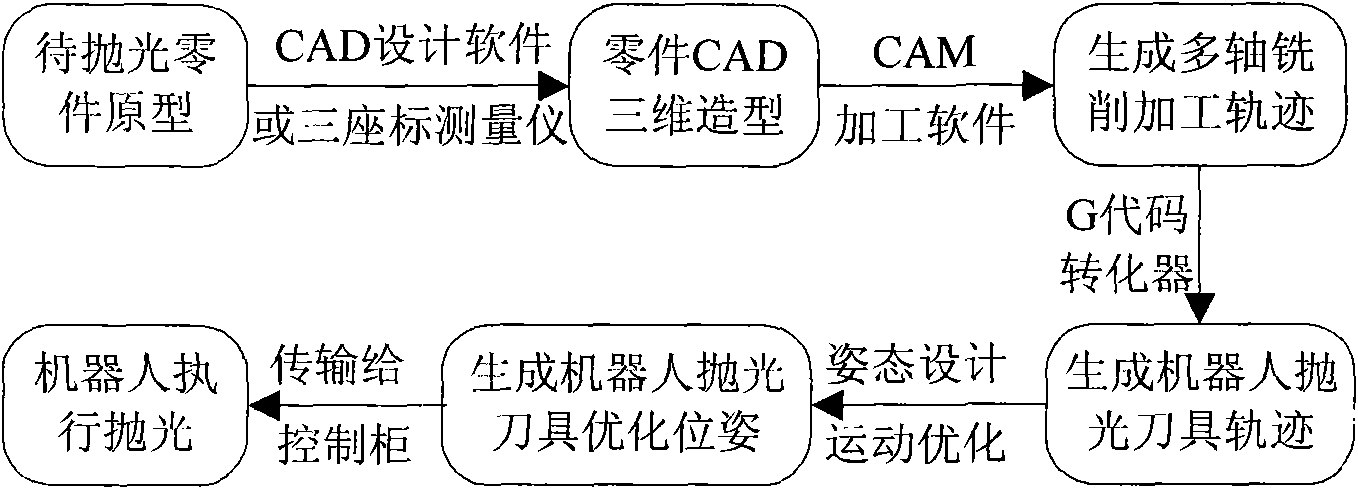
[0025] refer to figure 1 and figure 2 , an industrial robot processing control method based on the G code conversion method, providing a computer software and method, which can convert NC files into work files that can be recognized and executed by Motoman robots, and provide customization means to make G based on this method Transcoders are extensible.
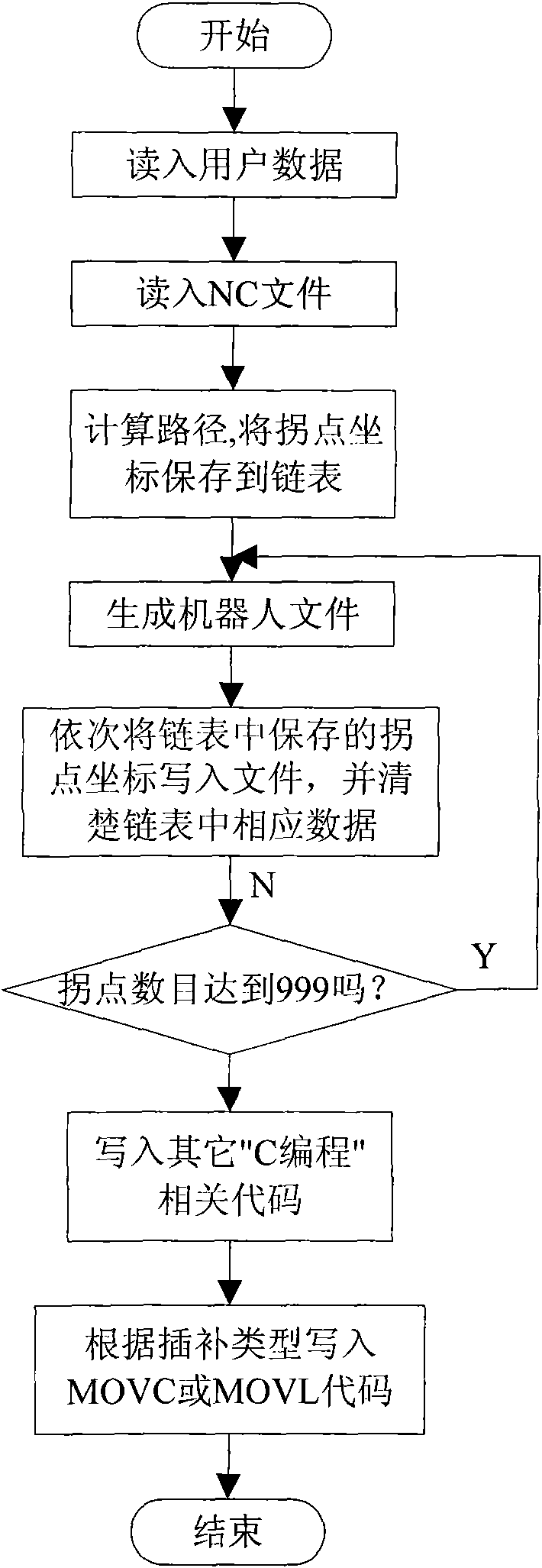
[0026] The control method of the present embodiment comprises the following steps:
[0027] The first step is to obtain user-customized data, that is, input initial conditions and robot information in the graphical user interface, such as the robot’s interpolation mode, interpolation speed, path planning process characteristics, and the initial pose of the robot’s execution end.
[0028] The second step is to import the NC file and calculate the coordinates of the inflection point, that is, read the coordinates of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More