

Planar friction and cylindrical friction combined two-degree-of-freedom joint
A combination and degree of freedom technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of low positioning accuracy, bulky robotic arms, inconvenient operation, etc., achieve high positioning accuracy, good joint rigidity, and improve positioning accuracy and safety effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
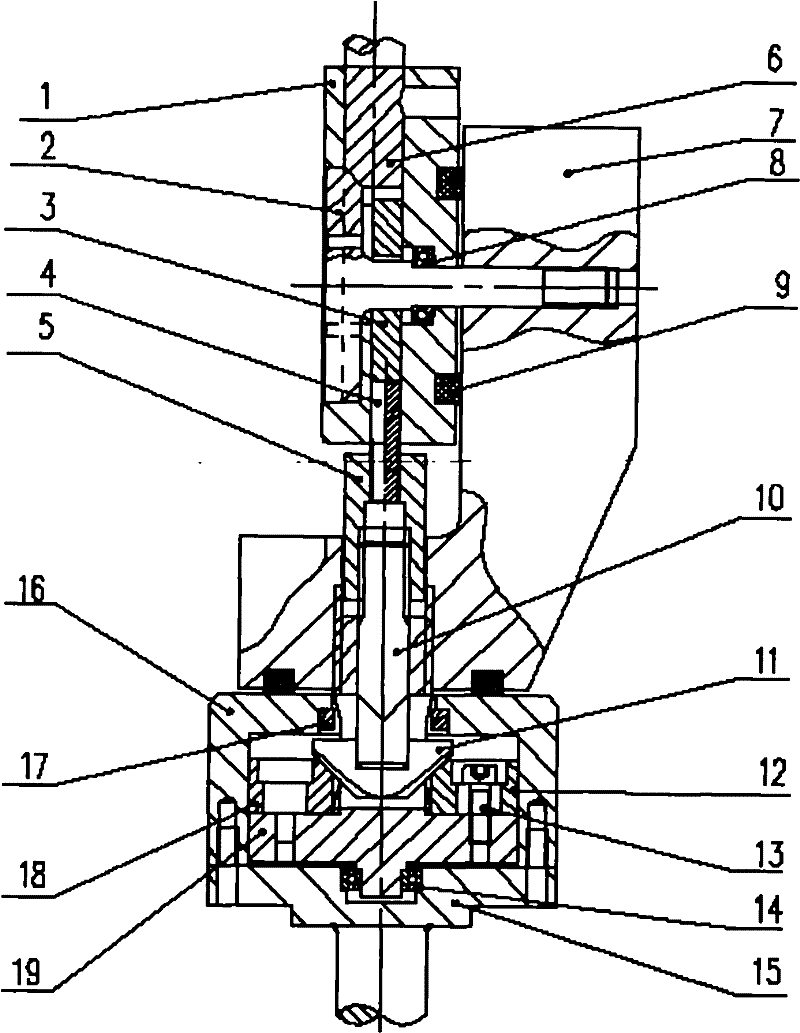
[0024] figure 1 It is a structural schematic diagram of a 2-DOF joint combining planar friction and cylindrical friction in the present invention;
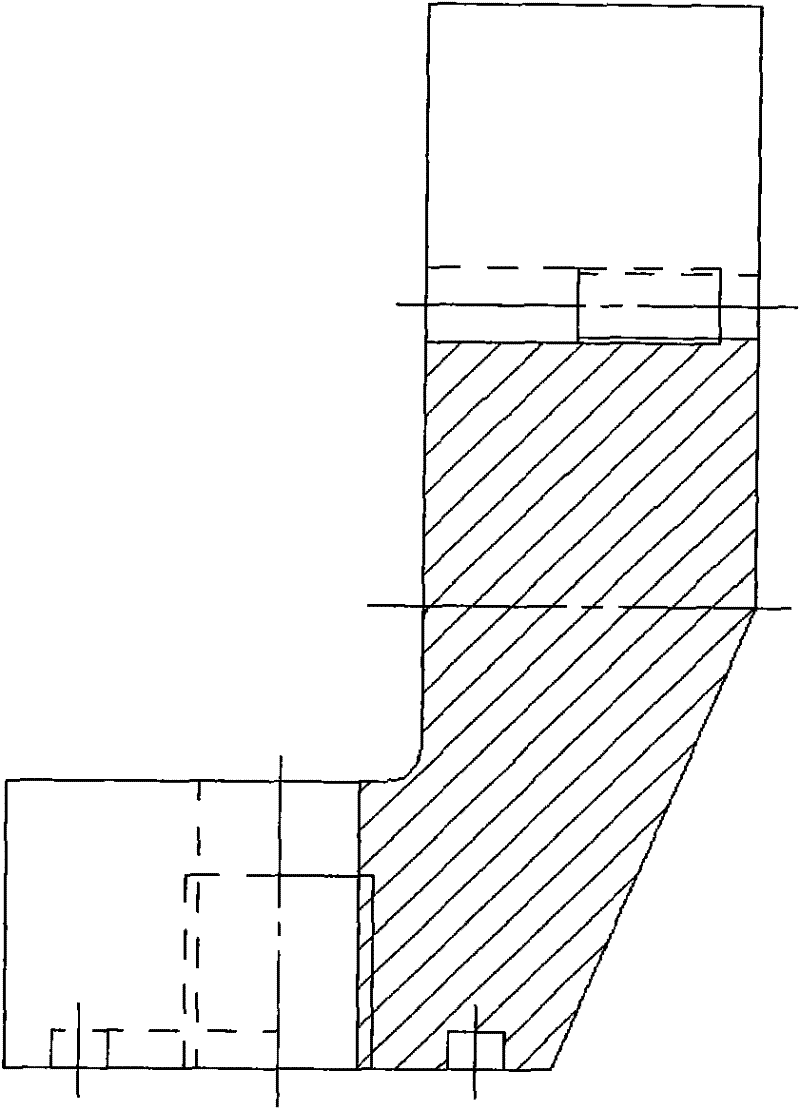
[0025] figure 2 for figure 1 The front view of the joint body in ; image 3 for figure 2 left view of Figure 4 for figure 2 look up
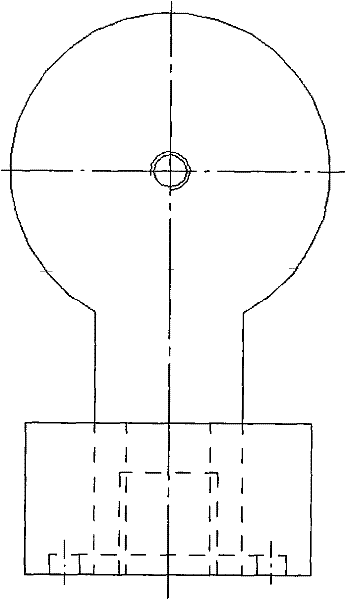
[0026] picture; Figure 5 for figure 1 The right view of the fan-shaped cylindrical friction plate in ; Figure 6 for figure 1 The top view of the fan-shaped cylindrical friction plate in ; Figure 7 for Figure 6 A-A in the sectional view.
[0027] As shown in the figure, the 2-DOF joint combining plane friction and cylindrical friction of the present invention includes a joint body 7, a lower joint T-shaped shaft 19 and an upper joint T-shaped shaft 2, wherein the joint body 7 is formed into an "L" The upper outer edge of the lower plane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More