

Hybrid vehicle powertrain test system capable of simulating working condition and inertia
A hybrid vehicle and simulation function technology, applied in vehicle testing, machine/structural component testing, measuring devices, etc., can solve the problem that the working conditions and safety of test personnel are difficult to guarantee, the influence of R&D work level, and the extension of R&D cycle, etc. problems, to achieve the effect of strict control of test conditions, increase of the number of R&D requirements, and elimination of differences in working conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
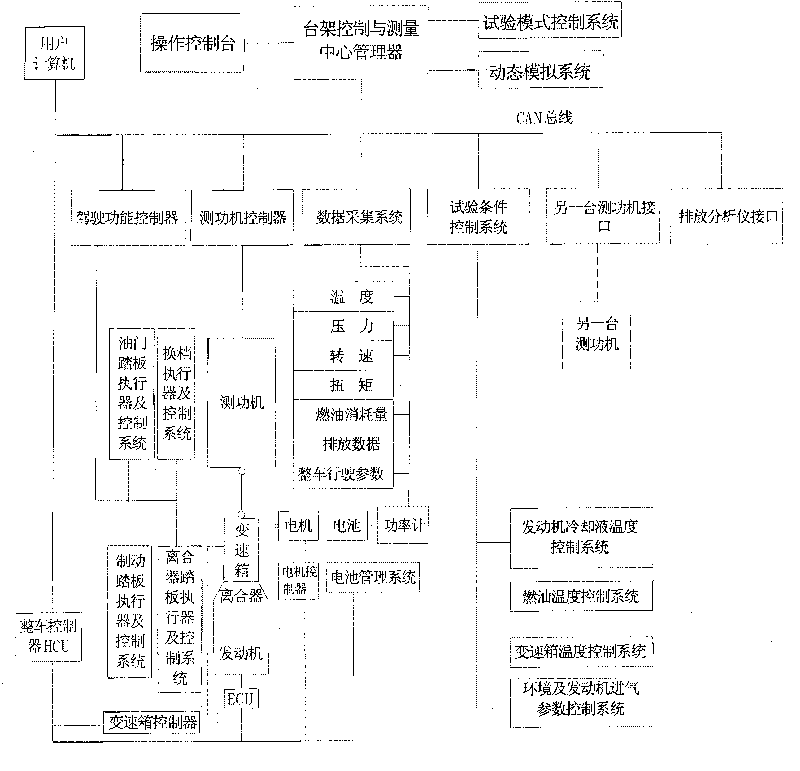
[0015] Such as figure 1 As shown, the bench control and measurement center manager is a comprehensive system for completing the hybrid powertrain bench test, and its main components include: operation console, bench control and measurement center manager, test mode control system, dynamic simulation system, Driving function controller, dynamometer and dynamometer controller, data acquisition system, test condition control system, etc.
[0016] The bench control and measurement center manager can perform automatic and manual operation on the bench. The system uses CAN bus to connect all the devices, it collects all the data and controls all the devices.
[0017] The user computer is connected between the bench control and measurement center manager and the vehicle controller HCU of the vehicle under test, which is used for real-time comparison and analysis of the relevant data of the bench and the relevant data of the vehicle HCU, and it is also convenient for different HCUs t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More