

Automatic obstacle avoiding method of intelligent detection vehicle based on behavior fusion in unknown environment
A technology of unknown environment and rover, applied in measurement devices, re-radiation of sound waves, radio wave measurement systems, etc. It can solve the problem that weights cannot be adjusted online, and achieve strong association ability, large-scale parallel collaborative processing ability, and strong fault tolerance. effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
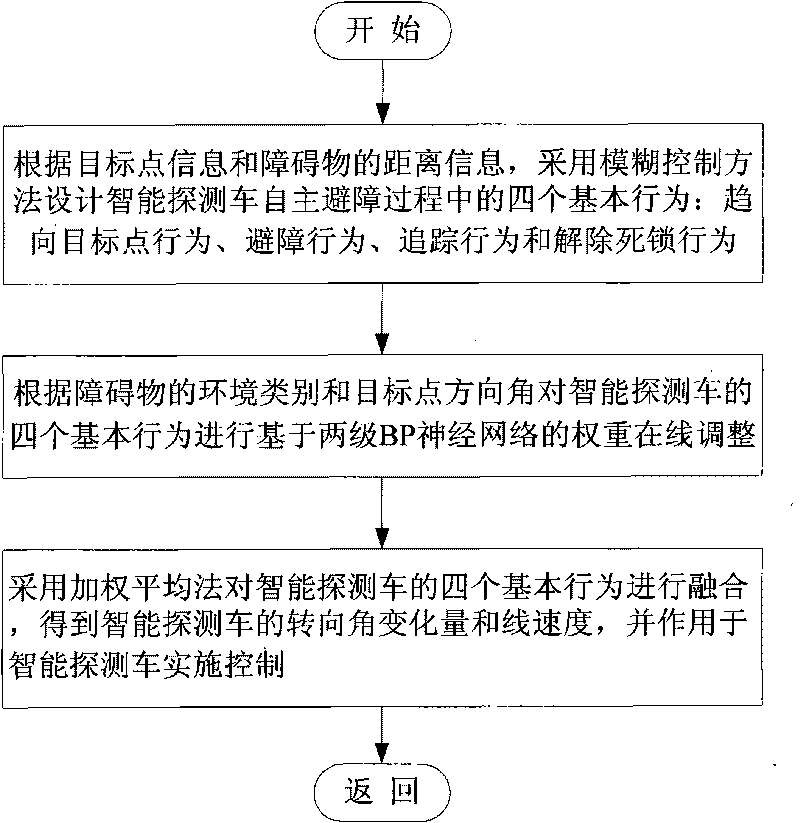
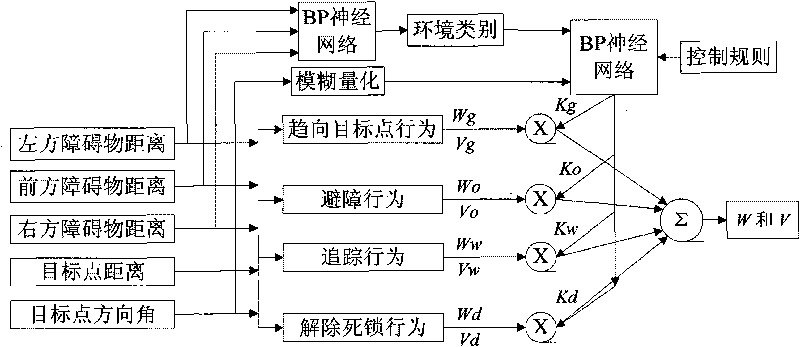
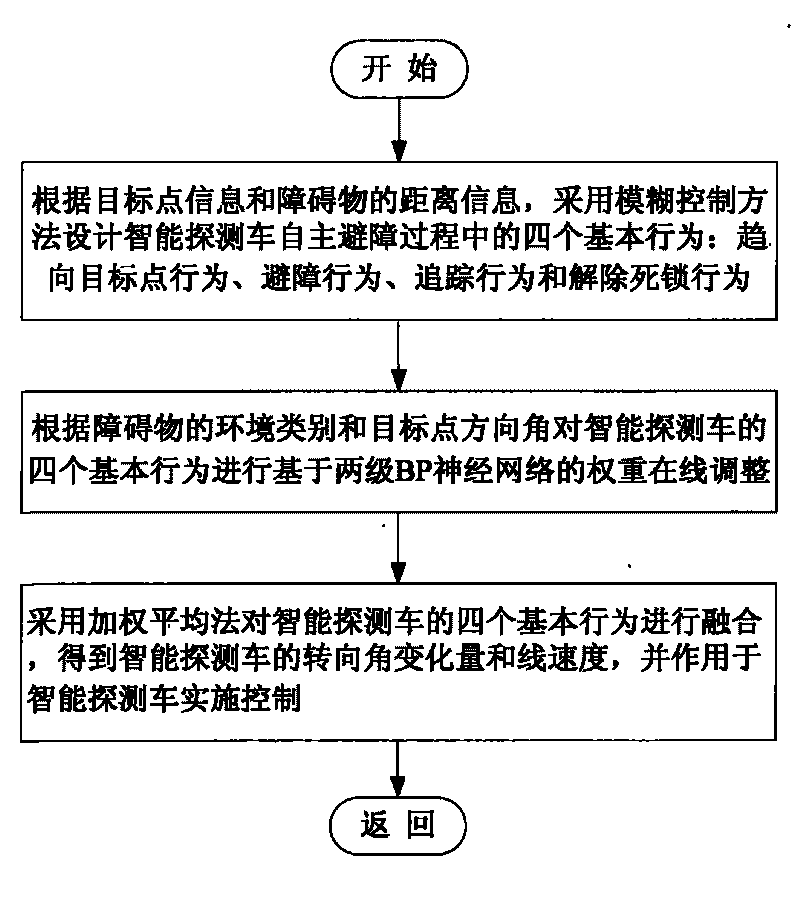
[0033] The implementation of the invention will be further described below in conjunction with the accompanying drawings. figure 1 It is a flow chart of the method of the present invention, such as figure 1 as shown, figure 2 Is the method structural diagram of the present invention, such as figure 2 As shown, the method includes the following three steps.
[0034]Step 1: According to the target point information and the distance information of the obstacle, the fuzzy control method is used to design the four basic behaviors in the autonomous obstacle avoidance process of the intelligent detection vehicle: approaching target point behavior, obstacle avoidance behavior, tracking behavior and deadlock release behavior. Specifically:
[0035] (1) Environmental coordinate system and control variables
[0036] Firstly, the two-dimensional reference coordinate system of the driving environment of the intelligent probe vehicle is established, and two coordinate systems are defi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More