Auxiliary development system of environment exploring robot and method thereof
A technology for robot assistance and system development, applied in the field of robotics, can solve problems such as time-consuming program developers, difficulty in debugging the system, and difficulty in capturing the details of algorithm execution, so as to reduce the probability of hardware equipment damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
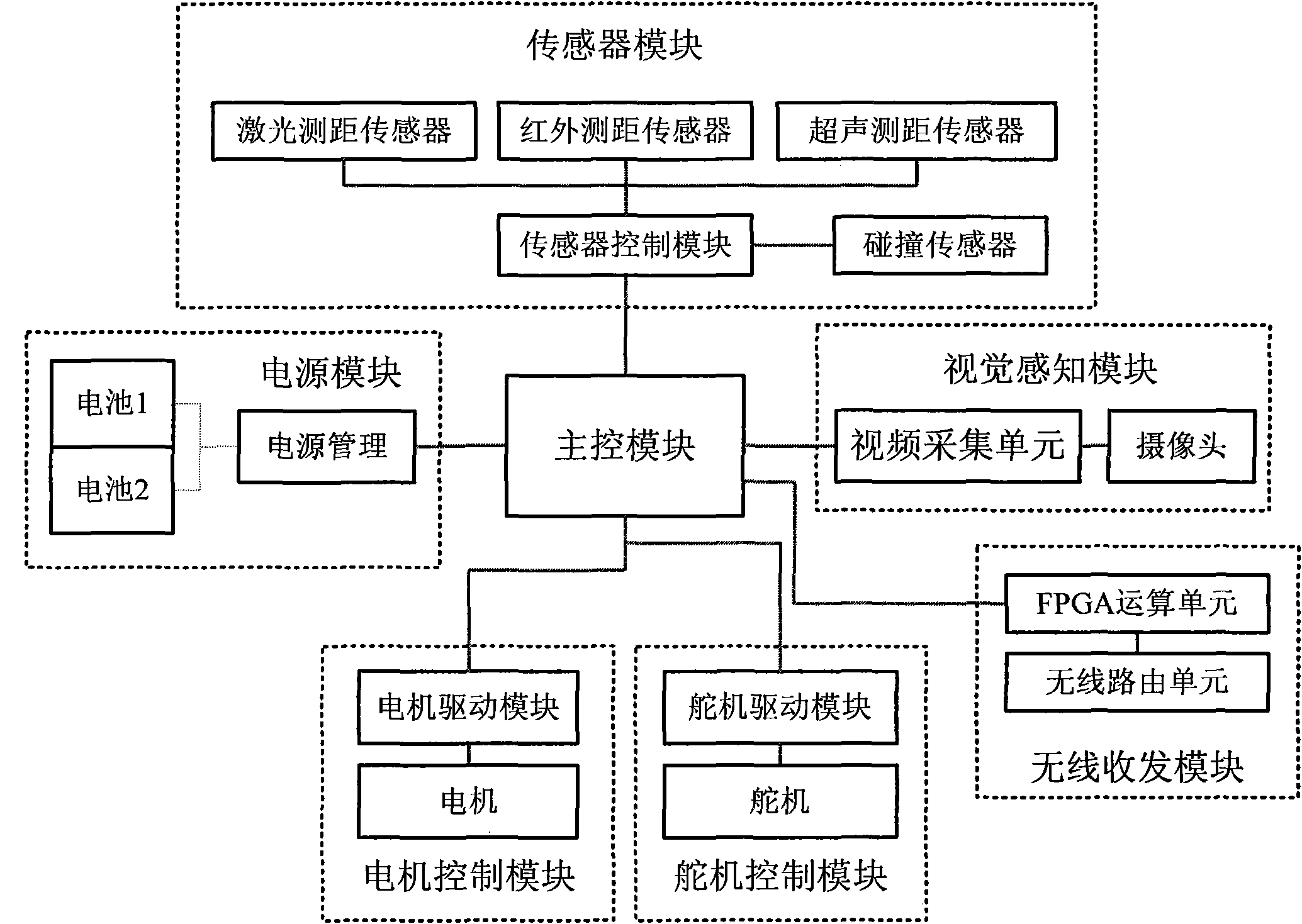
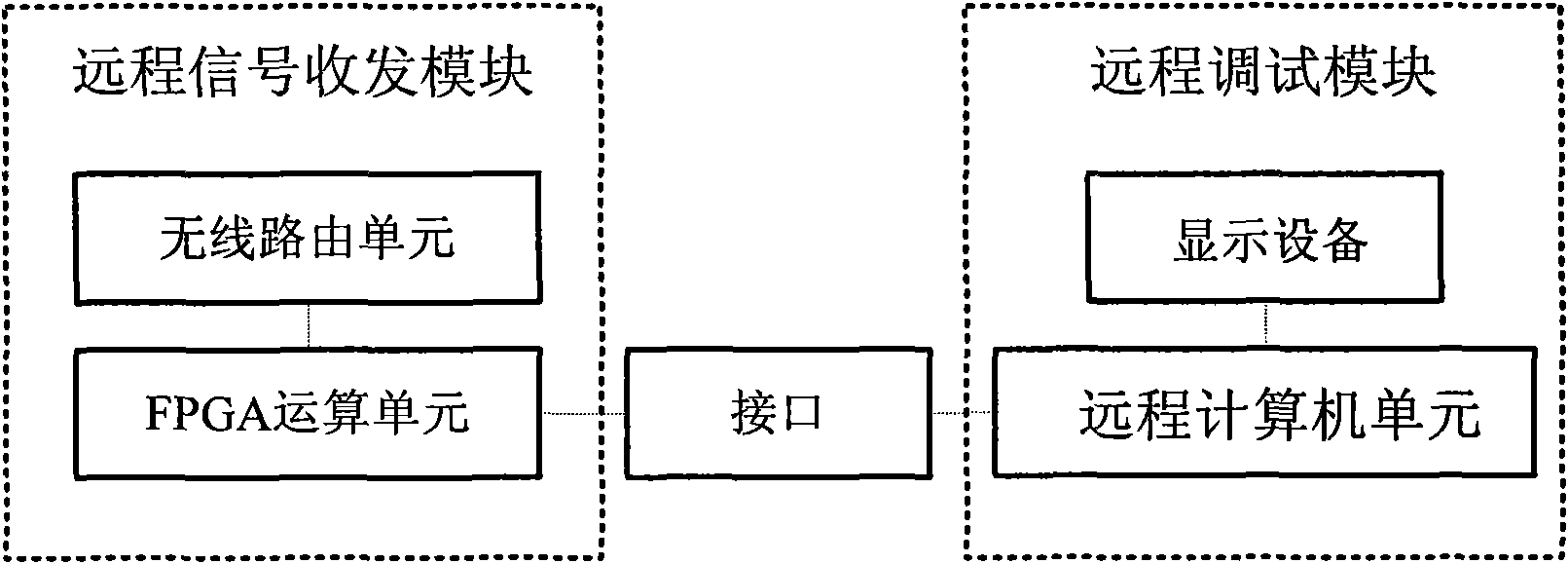
[0036] like figure 1 , 2 As shown, the environment detection robot auxiliary development system includes robot body equipment and remote equipment; the internal module connection relationship of the robot body equipment is: the main control module is connected with the sensor module, visual perception module, wireless transceiver module, steering gear control module, and motor control module respectively. The sensor module includes a sensor control board, a laser ranging sensor, an ultrasonic ranging sensor, an infrared ranging sensor, and a collision sensor; the sensor control board is connected with the laser ranging sensor, the ultrasonic ranging sensor, and the infrared ranging sensor respectively. The sensor and the collision sensor are connected; the visual perception module includes a connected analog video camera and a DSP video acquisition unit; the main control module is an FPGA main control chip; the motor control module includes a connected motor drive module and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com