

Open-shelf underwater detecting robot mechanism
A robot and frame technology, applied in the directions of underwater operation equipment, transportation and packaging, ships, etc., to achieve the effect of strong scalability, easy assembly, flexible and reliable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention is described in more detail below in conjunction with accompanying drawing example:
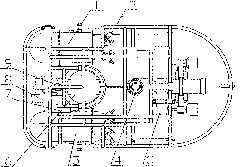
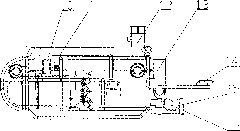
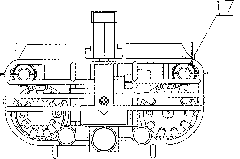
[0014] combine figure 1 ——4. The main body of the underwater detection robot is equipped with environmental sensing equipment, motion sensing equipment and motion execution equipment. The underwater detection robot consists of a frame 2, two left and right pressure chambers (control cabin and power supply cabin) 1, 5 installed on the frame 2, and the underwater robot main body composed of a buoyancy material 11; Thickness meter 14, front-view image sonar 12, underwater low-light camera 15; described motion perception equipment includes fiber optic compass 6, depth gauge 7; described motion execution equipment includes left main push propeller 17, right main push propeller 10, Rear side thrust propeller 8, rear vertical thrust propeller 9, front side thrust propeller 3 and front vertical thrust propeller 4, two-degree-of-freedom platform 13 (comprising two headlig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More