

Lower limbs rehabilitation training robot
A technology of rehabilitation training and robotics, which is applied in the field of robotics for medical rehabilitation training, can solve problems such as unfavorable promotion of rehabilitation training technology, failure to meet practical applications, and high price, and achieve the effects of high training efficiency, compact structure, and easy maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing.
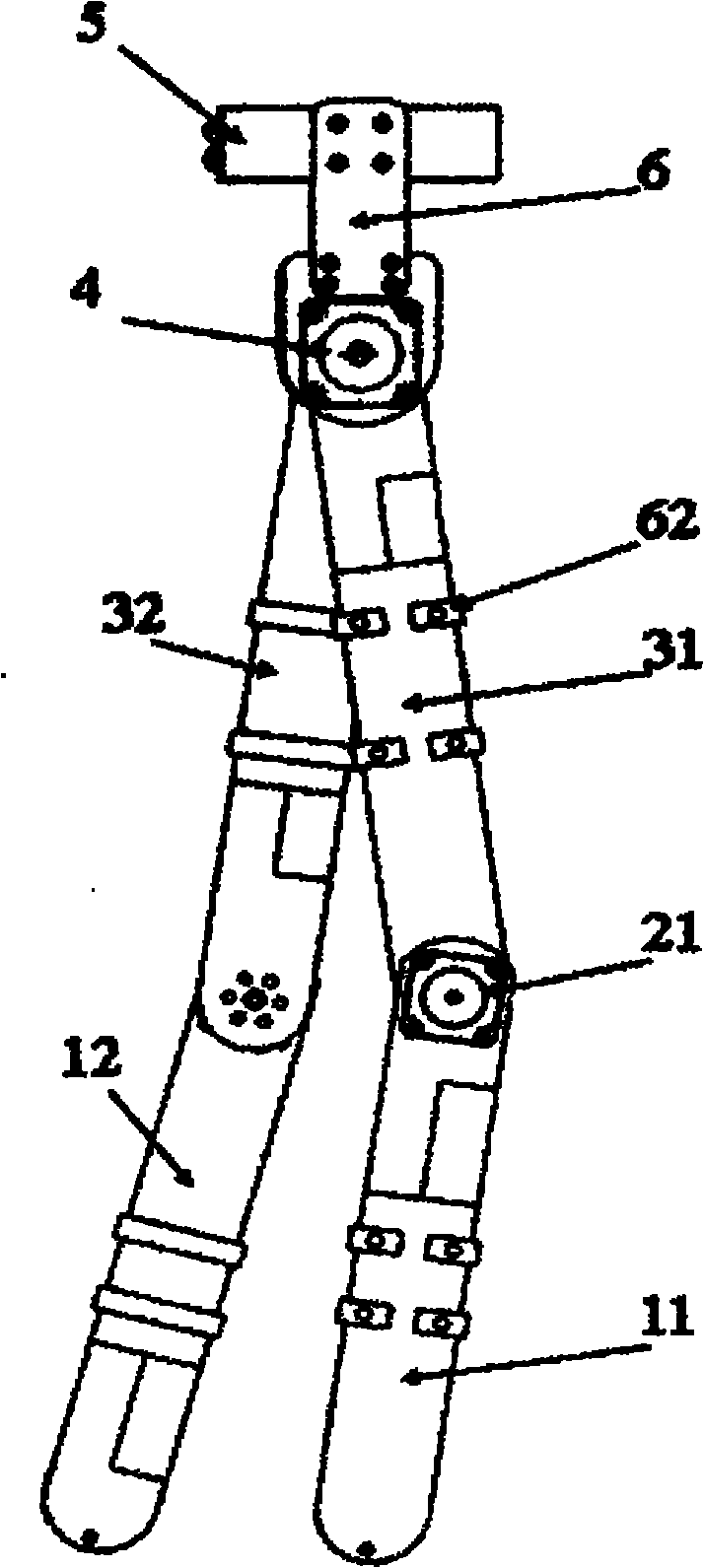
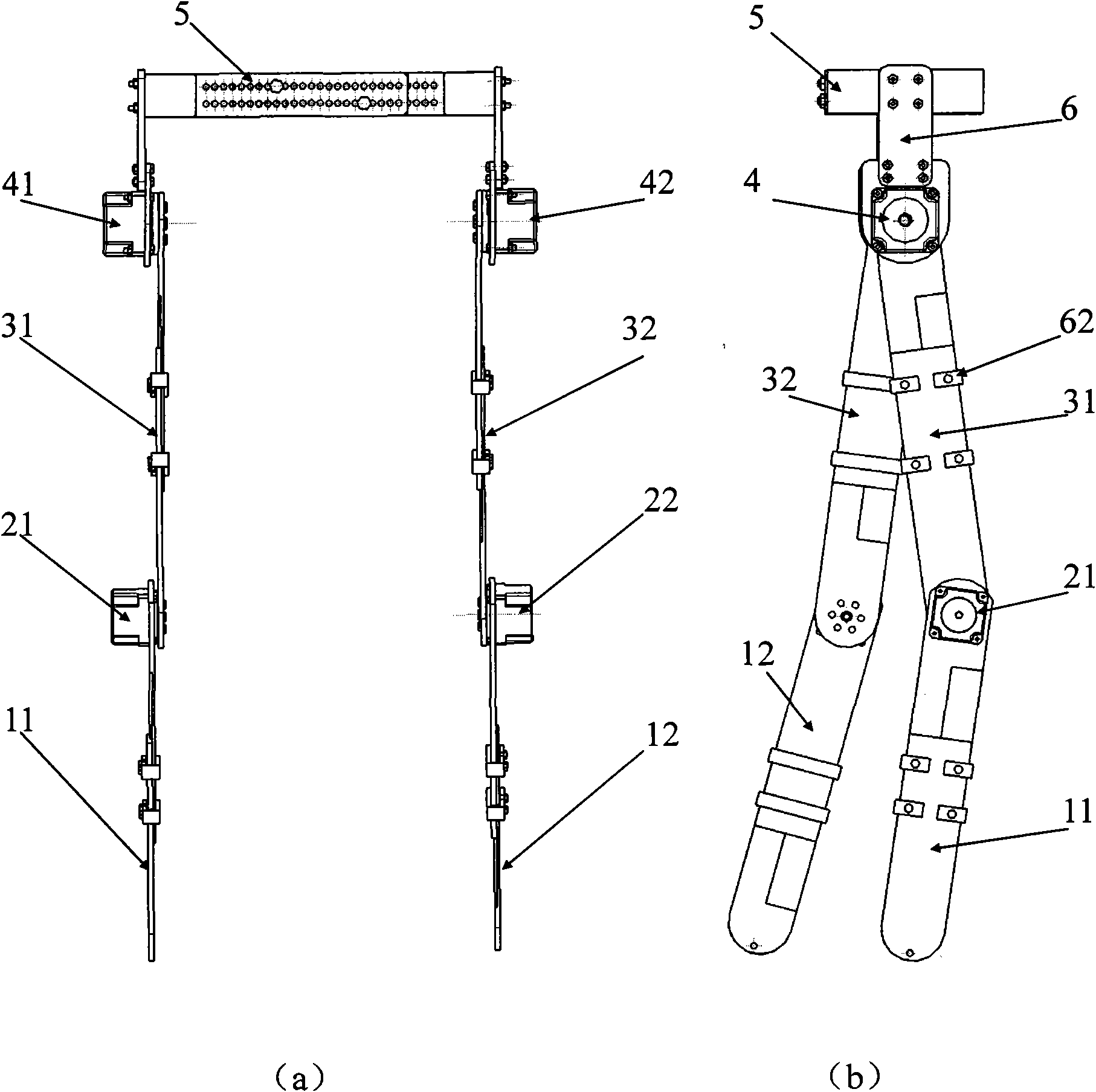
[0021] The lower limb rehabilitation training robot of the present invention (referred to as the robot, referring to FIGS. 1-7 ) includes two parts: an exoskeleton lower limb mechanical structure and a control system independent of the mechanical structure.
[0022] The exoskeleton-type lower limb mechanical structure (see Fig. 1) adopts anthropomorphic design, and the mechanical structure of the robot includes a waist structure and left and right symmetrical thigh structures and calf structures mechanically connected thereto.
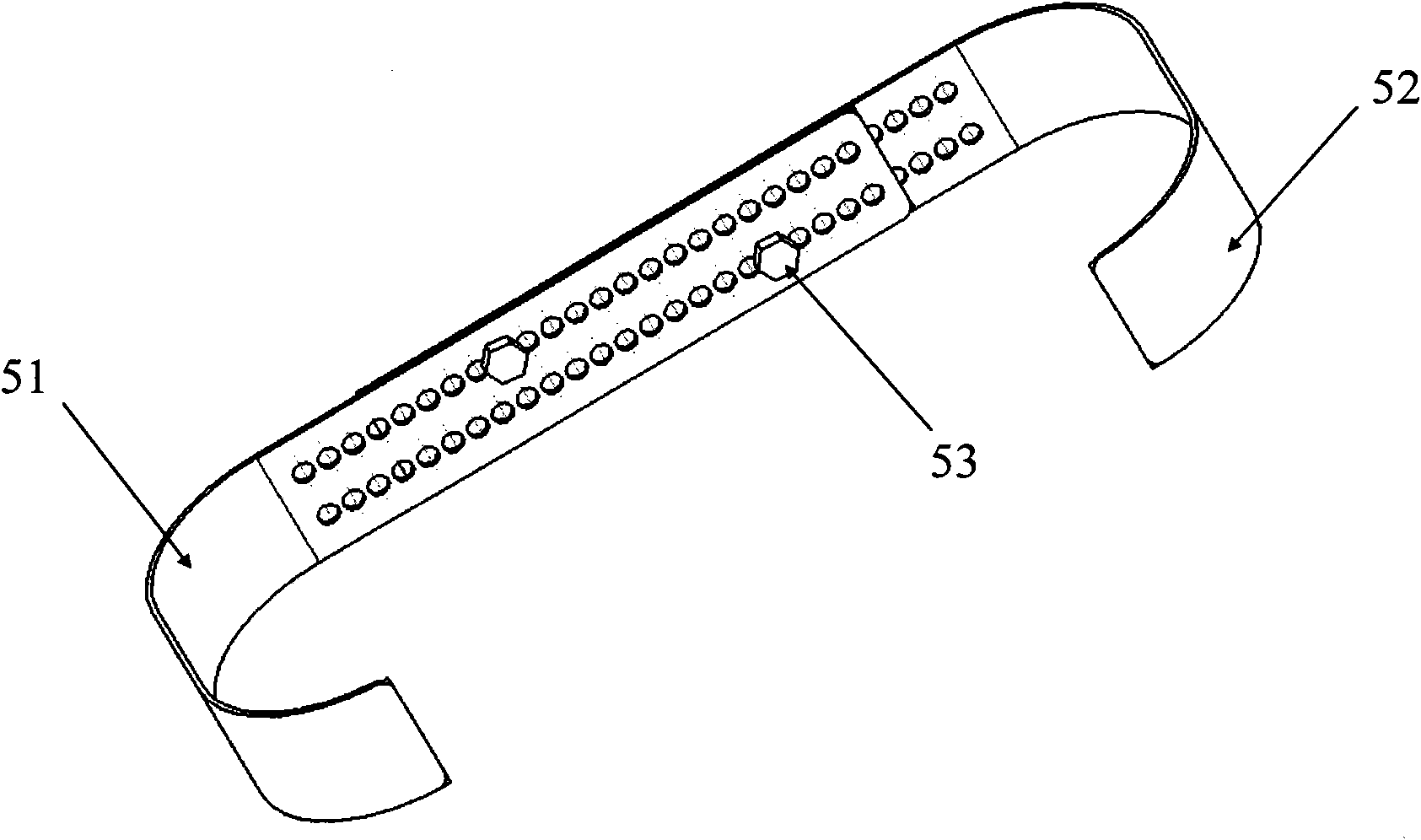
[0023]The waist structure and the left-right symmetrical thigh structure and calf structure of the robot embodiment of the present invention can be adjusted according to the body shape and height of the person, and can be worn by people with a height of 145cm to 190cm and a waist circumference of 50cm to 120cm. The waist connection plate (ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More