

Walking aid electrostimulation fine control method based on genetic-ant colony fusion fuzzy controller
A fuzzy controller and precision control technology, applied in the field of rehabilitation training, can solve the problems of slow solution speed, lack of pheromone, and low efficiency of accurate solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
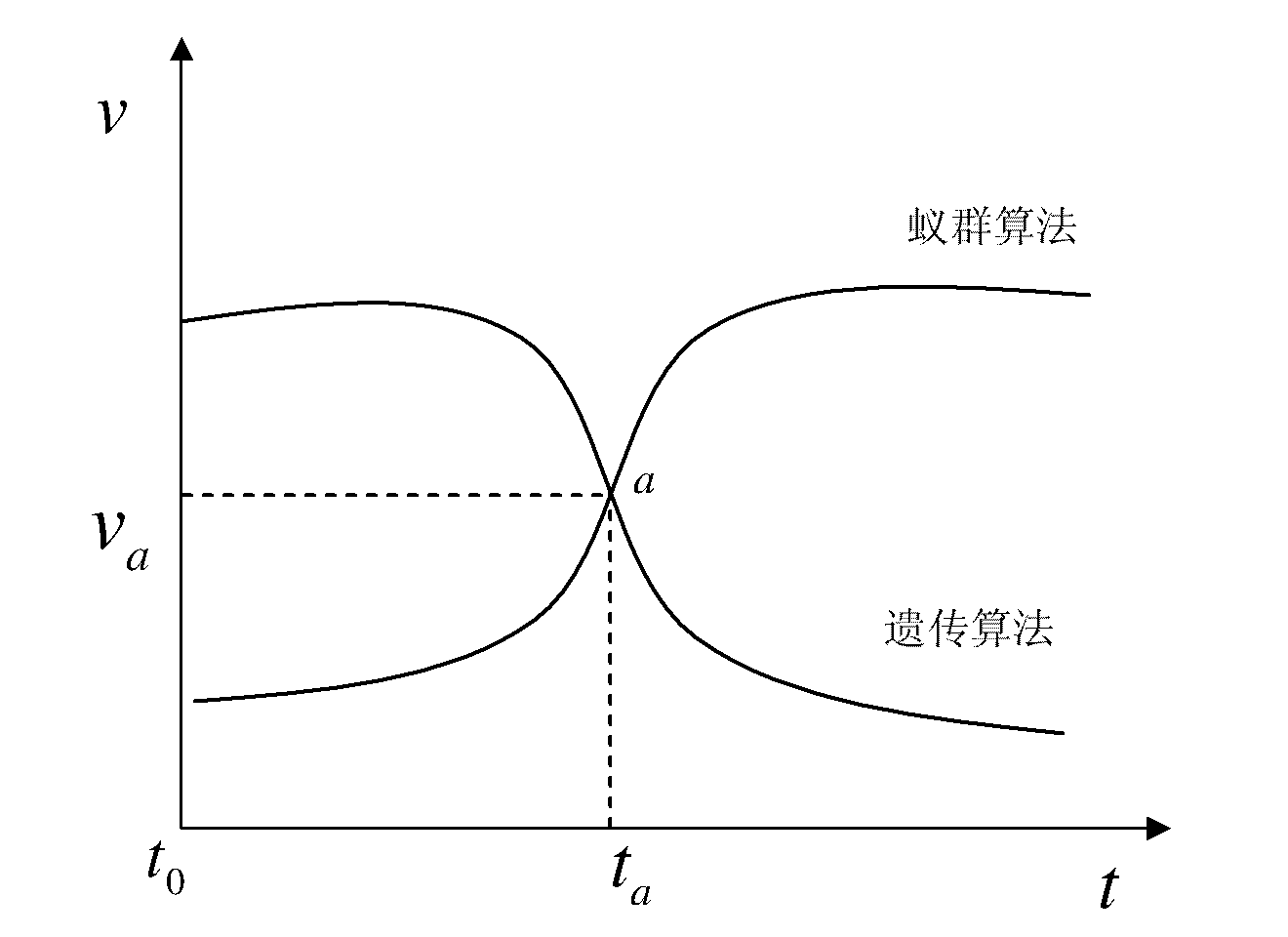
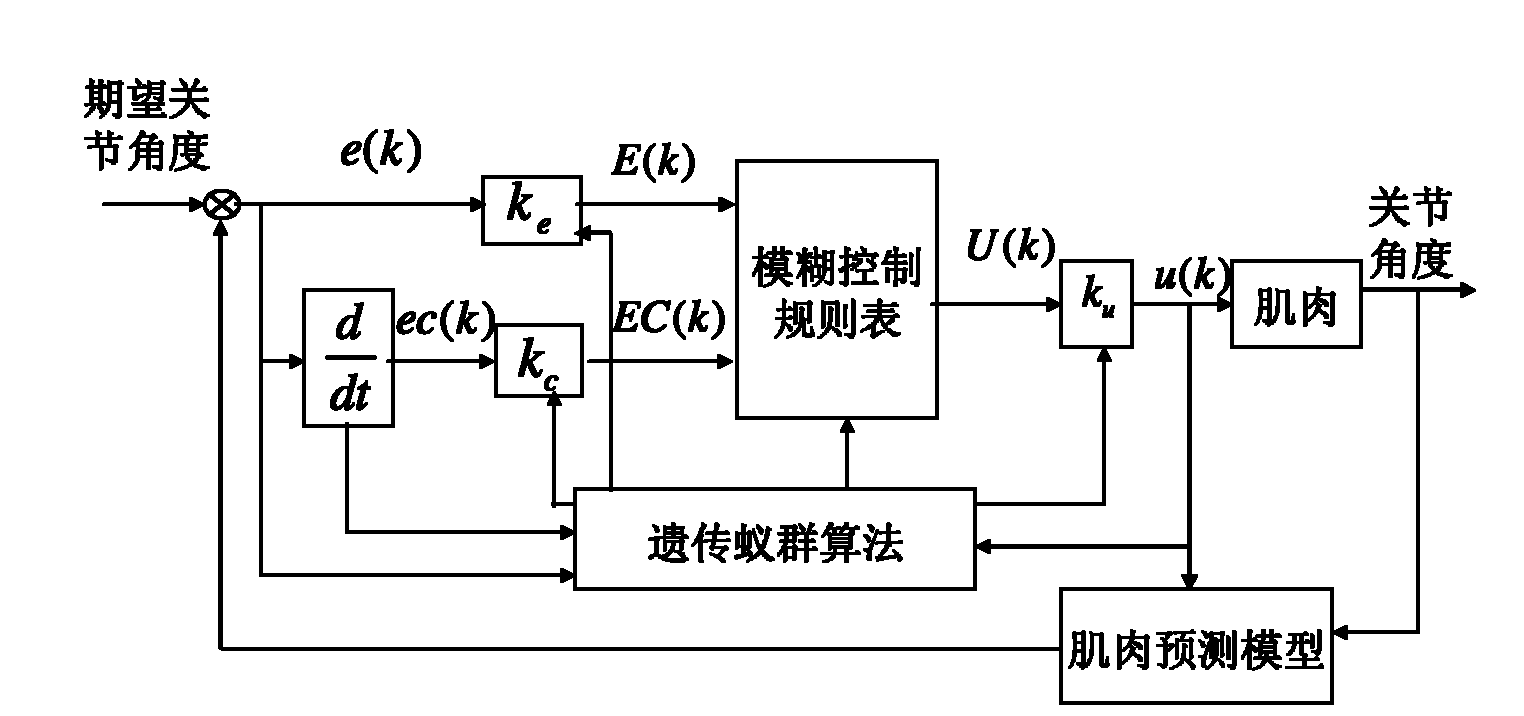
[0069] The structure of the application of the precise control method of walking aid functional electrical stimulation based on genetic ant colony fusion fuzzy control is as follows figure 2 shown. Its working process is as follows: firstly, the selection of 12 decision variables of quantization factor, proportional factor and membership function parameter of fuzzy control is transformed into a combinatorial optimization problem applicable to genetic and ant colony algorithm, and it is coded and n individuals are randomly generated The chromosomes (initial population) formed, and then establish a reasonable relationship between the actual joint angle and the muscle model output joint angle and determine the parameter settings of the ant colony algorithm, making full use of the rapidity, randomness, and global convergence of the genetic algorithm. The result is to generate the initial pheromone distribution in the ant colony algorithm, use ants to randomly search for variables...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More