

Humanoid robot head based on bevel gear differential coupling mechanism
A technology of humanoid robot and coupling mechanism, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large head space, large independent joint structure, and uncompact head structure, etc., and achieve large internal space, Improving the effect of humanoid and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
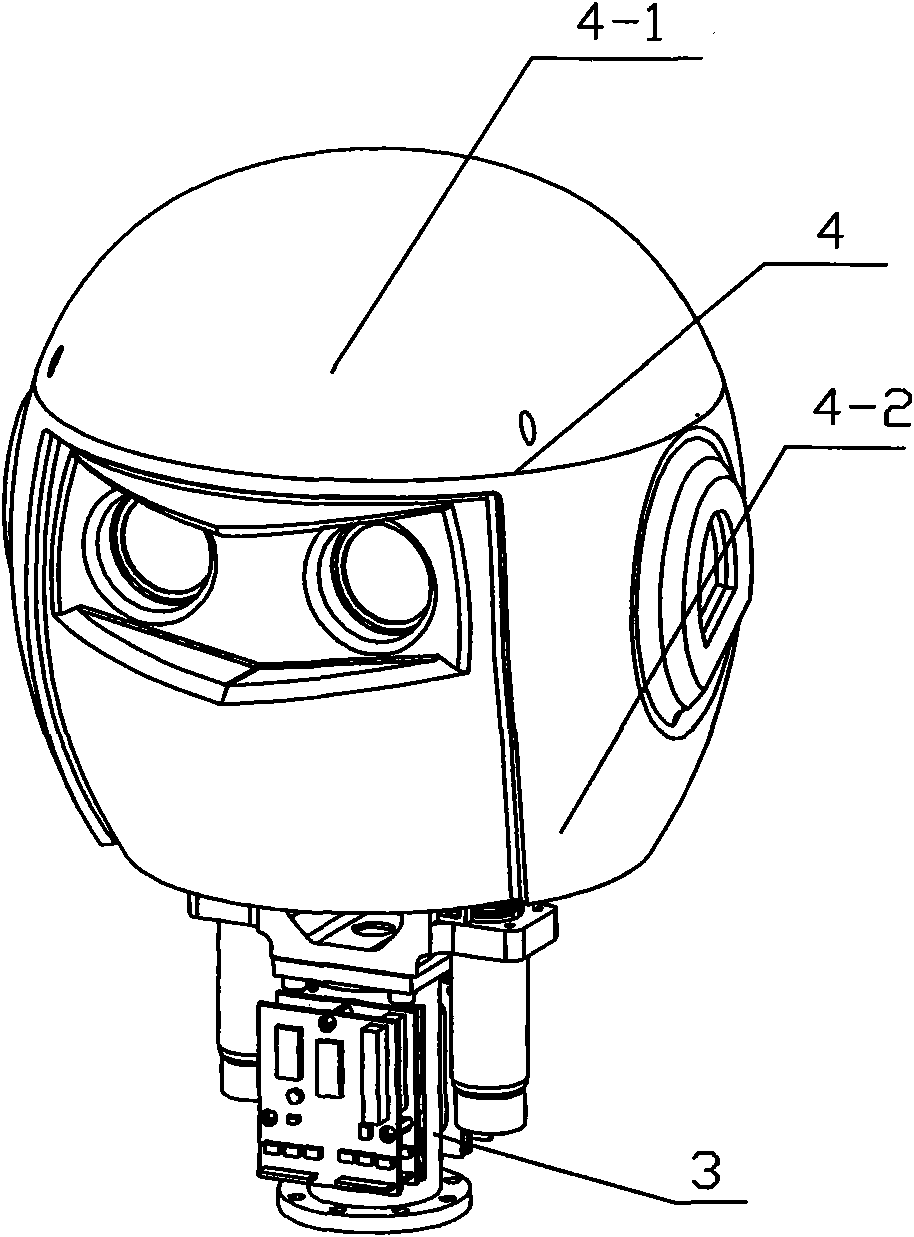
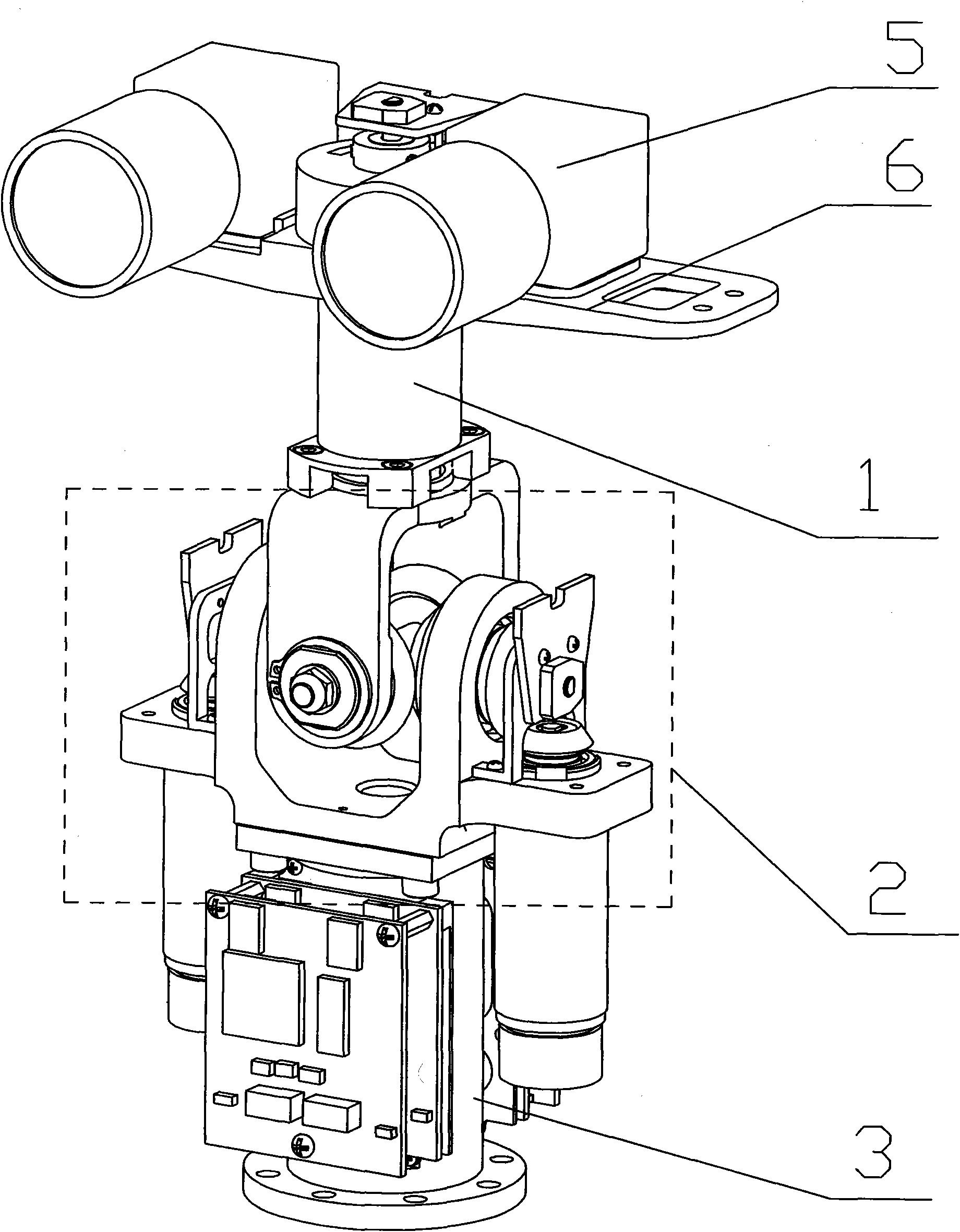
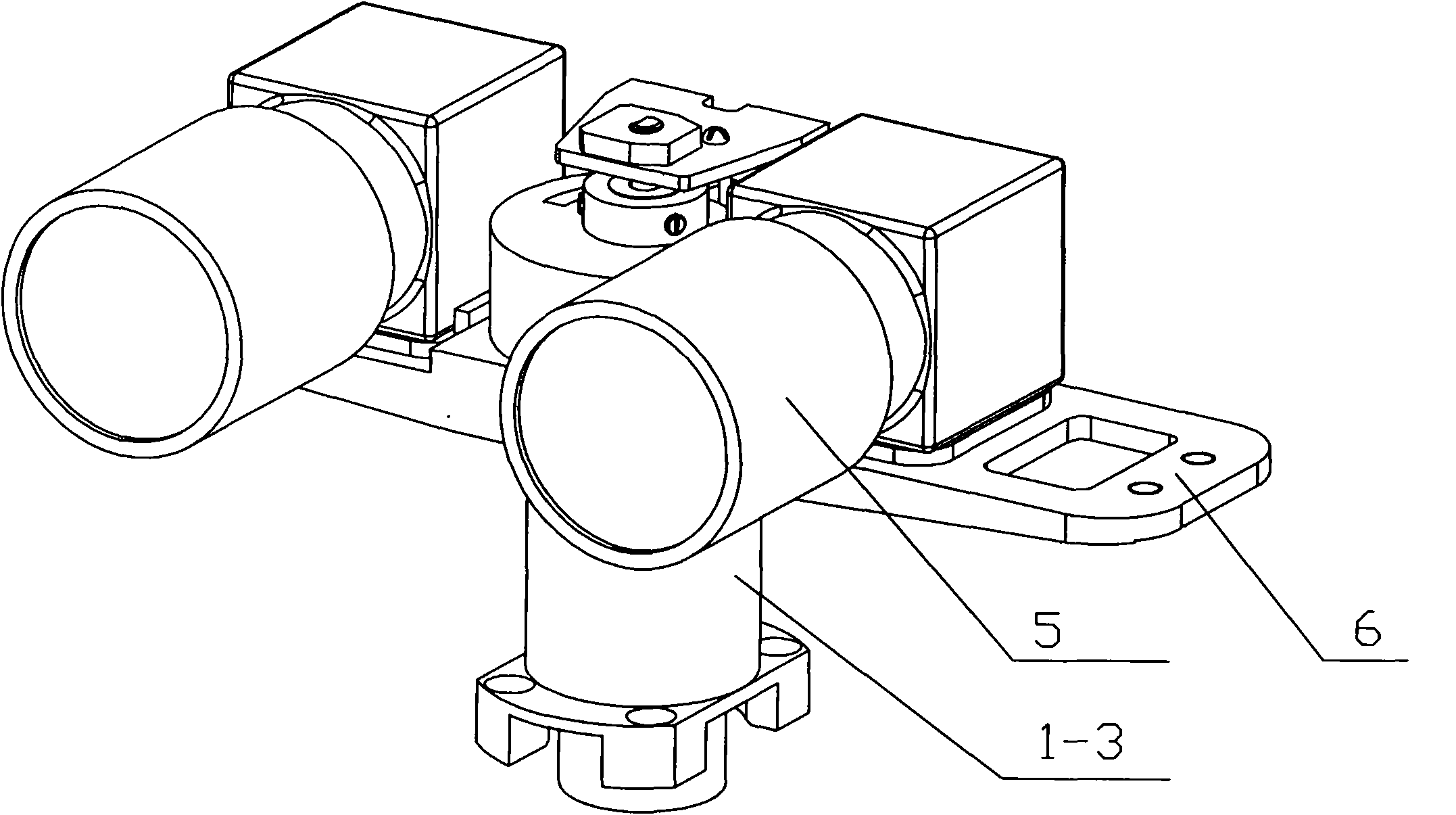
[0010] Specific implementation manner one: such as Figure 1-9 As shown, the head of the humanoid robot of this embodiment is composed of a head revolving joint 1, a neck base joint 2, a neck base 3, a head shell 4, two cameras 5, and two camera mounting adjustment slides 6. The head rotary joint 1 is composed of the first disc brushless DC motor 1-1, planetary gear reducer 1-2, rotary joint support 1-3, camera rotary bracket 1-4, rotary hollow sleeve shaft 1-5, The deep groove ball bearing 1-6 and the joint angle feedback shaft 1-7 are formed, the output end of the first disc brushless DC motor 1-1 is drivingly connected with the input end of the planetary gear reducer 1-2, and the planet The gear reducer 1-2 is installed in the inner hole of the rotary joint support 1-3, and the output shaft of the planetary gear reducer 1-2 is fixedly installed in the inner hole of the rotary hollow sleeve shaft 1-5. The hollow sleeve shaft 1-5 (through the set screw 1-10) is installed in t...
specific Embodiment approach 2
[0014] Specific implementation manner two: such as figure 1 As shown, the head shell 4 of this embodiment is made of resin plastic (made by rapid prototyping), which is easy to process. Other components and connection relationships are the same as those in the first embodiment.
specific Embodiment approach 3
[0015] Specific implementation manner three: such as figure 1 As shown, the head shell 4 of this embodiment is composed of an upper head shell 4-1 and a lower head shell 4-2, and the lower head shell 4-2 is detachably connected to the upper head shell 4-1. This structure is easy to disassemble and install. Other components and connection relationships are the same as those in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More