

Haptic modeling method for deformation simulation of flexible body
A modeling method and flexible body technology, applied in the input/output of user/computer interaction, graphic reading, mechanical mode conversion, etc., can solve the problems of poor stability, low calculation accuracy, insufficient stability, etc., to improve the fidelity , Simple calculation, accurate and fast calculation of the effect of deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
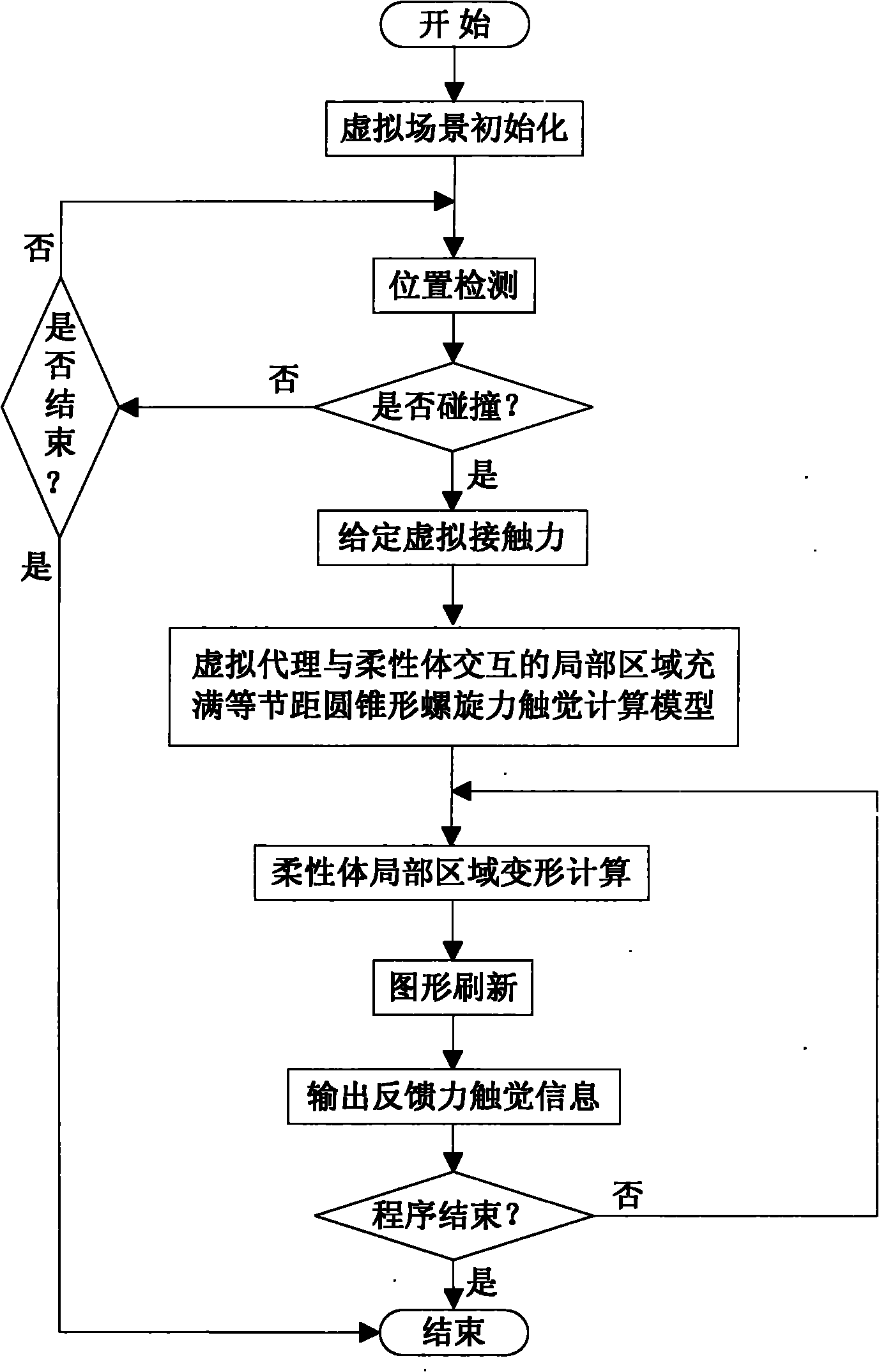
[0050] A haptic modeling method for flexible body deformation simulation, characterized in that the main steps of the modeling method are as follows:
[0051] Step 1 initializes the virtual scene;
[0052] Step 2 When it is detected that the virtual agent collides with any point on the surface of the virtual flexible body, under the action of a given virtual contact force F, the local area where the virtual agent interacts with the virtual flexible body is filled with equal-pitch conical spirals in each layer The spring force tactile virtual model, in the interaction process, the output feedback is the signal calculated by using the equal-pitch conical helical spring force tactile virtual model to reflect the force tactile information of the real-time deformation simulation of the flexible body under the action of external force. The modeling method of the tactile virtual model of conical coil spring force is as follows:
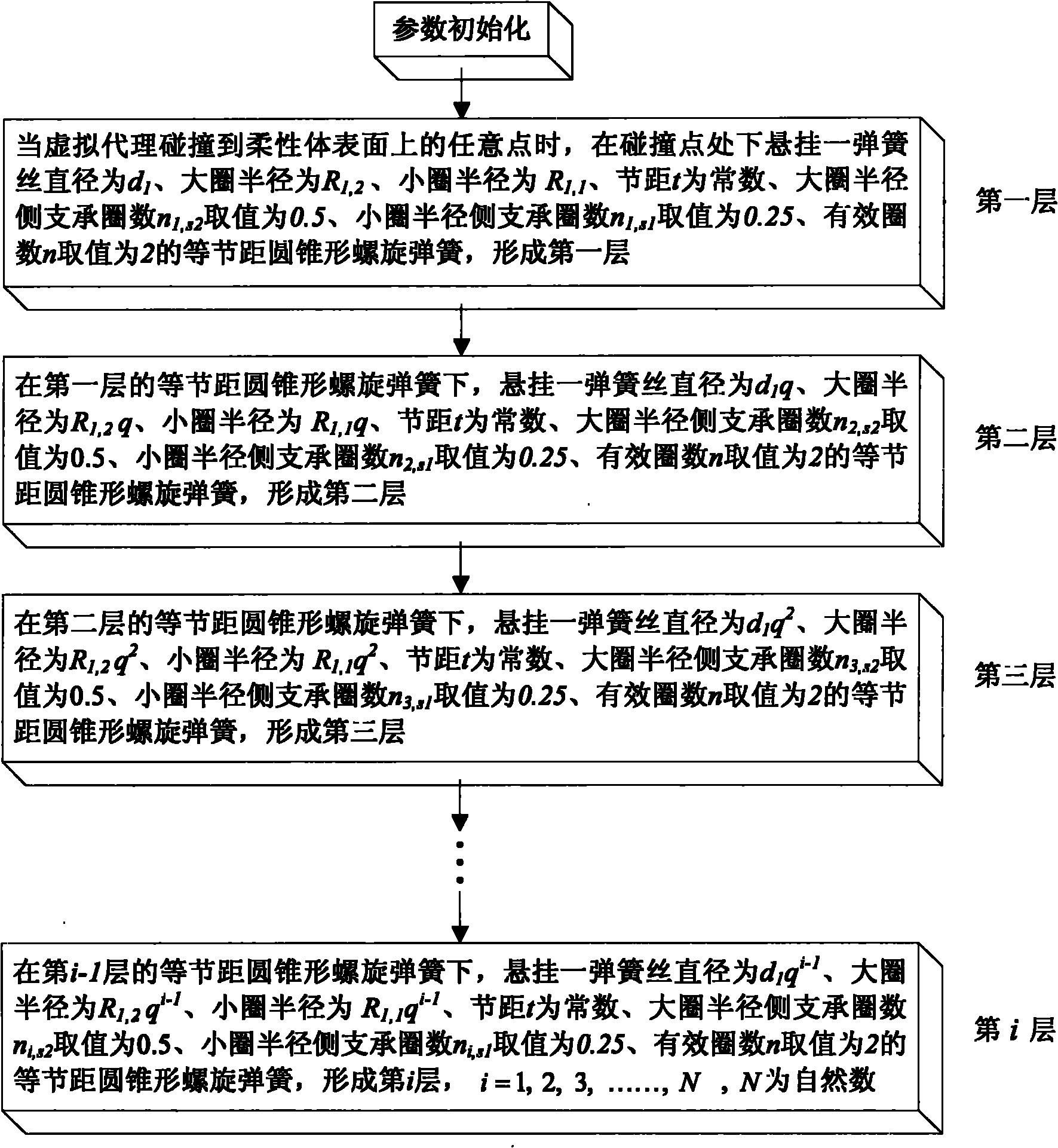
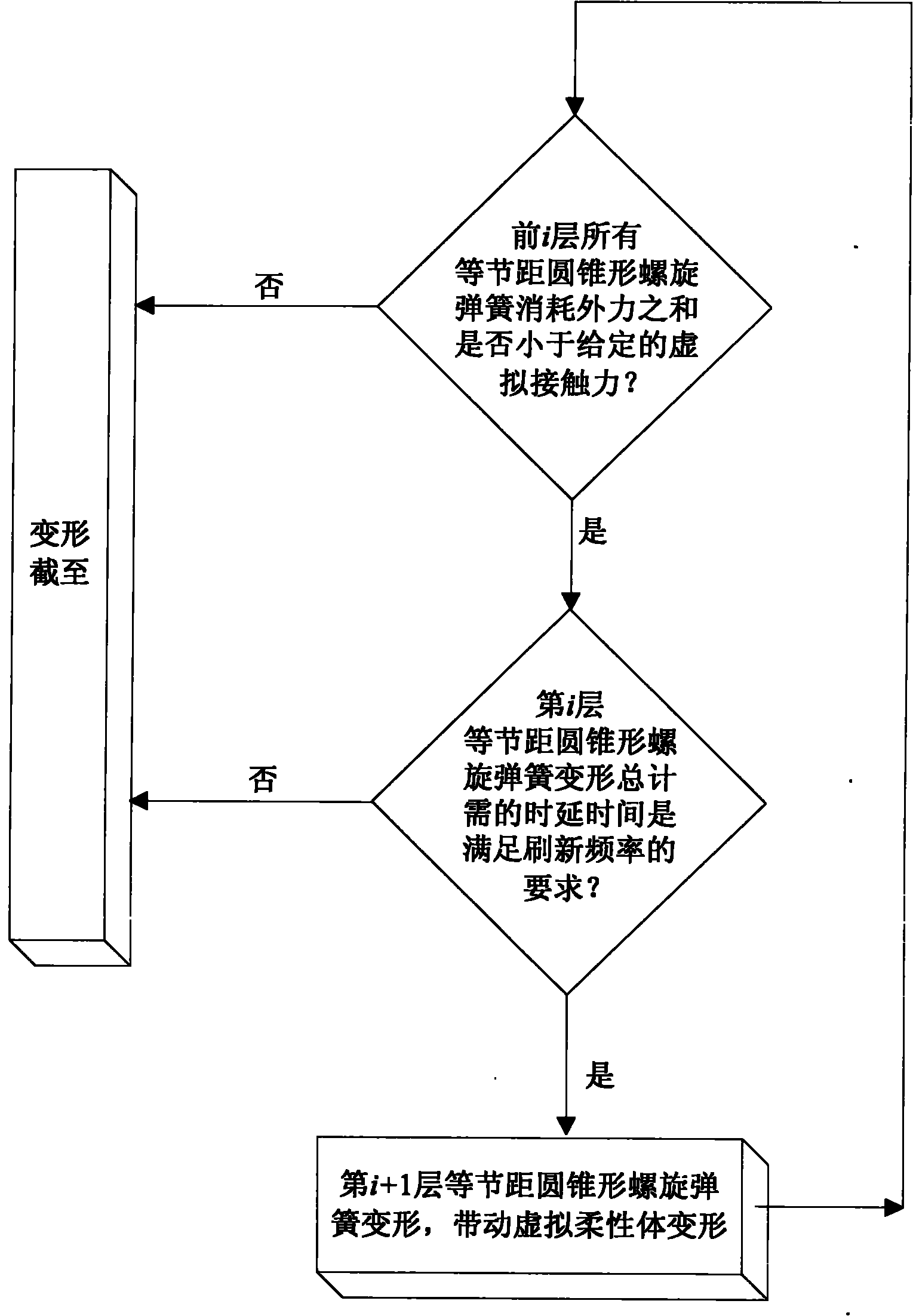
[0053] (1) Parameter initialization,
[0054] (2) Un...
specific Embodiment 2
[0084] 1. Construct a virtual gallbladder model and a virtual medical bending forceps model to realize the initialization of the virtual scene.
[0085] All virtual gallbladder and virtual medical bending forceps models in this example are directly in the format of OBJ exported from 3DS MAX 9.0 software, with 1057 particles, 2110 triangle meshes for virtual gallbladder and 461 particles, 921 triangle meshes The virtual medical bending forceps constituted as an example to carry out deformation simulation, the model acquisition and modification is very convenient; the operating platform is Windows 2000, based on 3DS MAX 9.0, OpenGL graphics library, and the simulation is carried out on the VC++6.0 software development platform.
[0086] 2. When it is detected that the virtual medical curved forceps collides with any point on the surface of the virtual gallbladder, under the action of a given virtual contact force F=2.4N, the internal filling of each layer in the local area where ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More