

Supplementary motion system and control method thereof
A movement system and action technology, applied in the direction of sports accessories, passive exercise equipment, muscle training equipment, etc., can solve the problems of not being able to provide active force for the patient, little help for the patient to restore the ability of daily life, stimulation, etc., to achieve stimulating achievements The effect of feeling and using interest, reducing mental load, and enhancing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
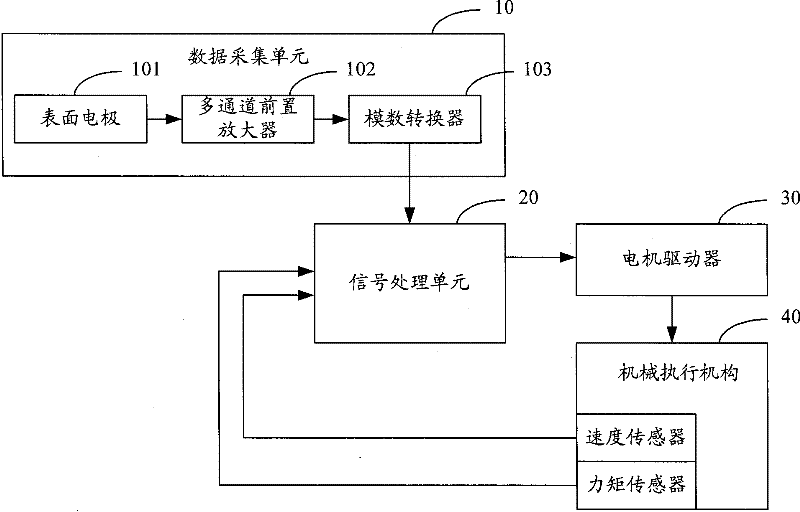
[0022] Such as figure 1 As shown, an auxiliary motion system includes a data acquisition unit 10, a signal processing unit 20, a motor driver 30 and a mechanical actuator 40, wherein:
[0023] The data collection unit 10 is used for collecting myoelectric signals of multiple parts of the body. In this embodiment, the data acquisition unit 10 includes a surface electrode 101, a multi-channel preamplifier 102, and an analog-to-digital converter 103. The surface electrode 101 is attached to the muscle surface of multiple parts of the limb, usually attached to the muscle surface of the limb. On multiple joints, the number and position of electrodes are also different according to the degree of limb paralysis and the expected recovery of motion data. Generally, 3 to 12 surface electrodes 101 can be provided, which are respectively attached to the muscle surfaces of the shoulder, upper arm, forearm and hand. The surface electrode 101 collects the myoelectric signal of each part, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More