

A robot tactile action recognition system and recognition method
A technology of motion recognition and robotics, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of less information, more information, and occupying computer resources, etc., to achieve improved accuracy, strong robustness, and fault tolerance Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
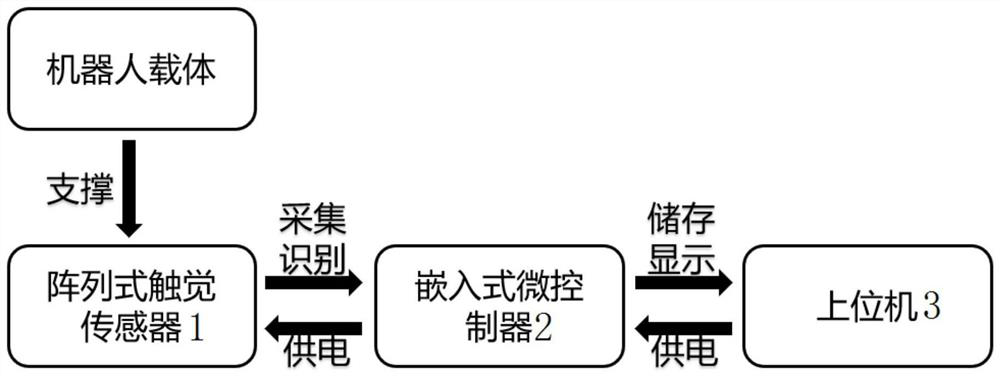
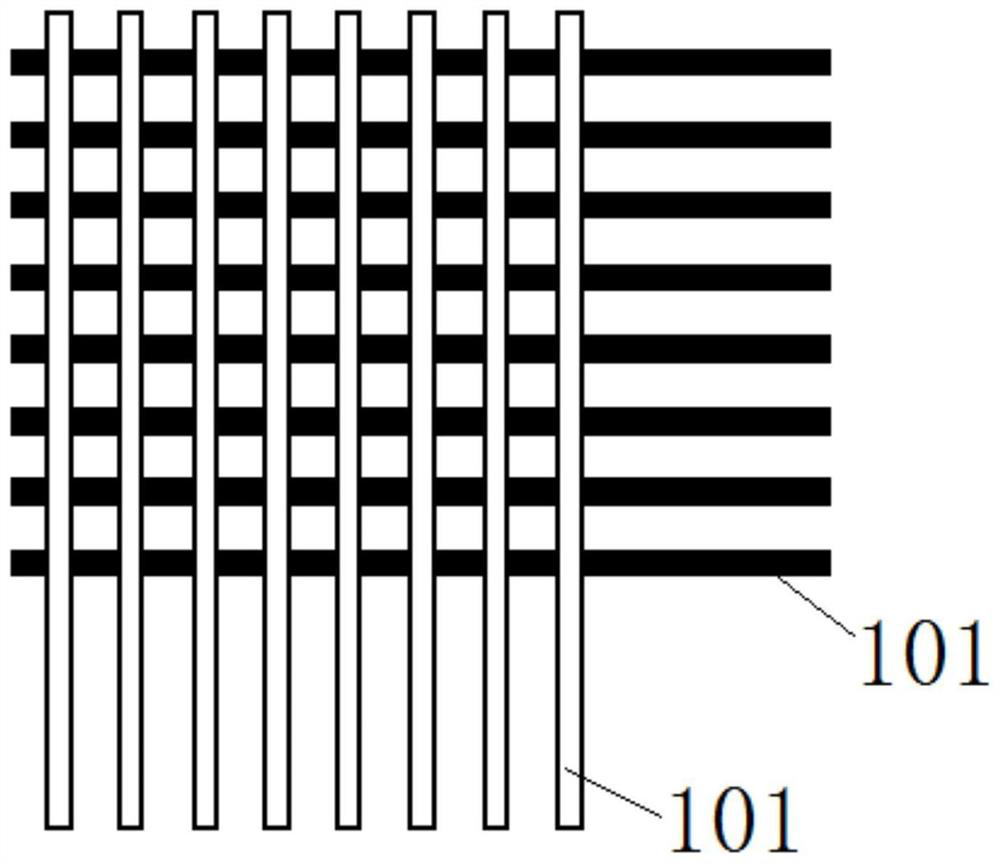
[0066] In this embodiment, in (1) of the first step, the carrier is the forearm of the robot, m=32, n=32, x=100, M=25, R=12, N=40 (20 times for the right hand, 20 times for the left hand ), P=12000, u=32. The 12 kinds of characteristic actions are pulled, pinched, pushed, grasped, grasped, poked, pulled, hit, stroked, scratched, patted, and slid. The embedded microcontroller 2 is connected with the host computer 3 through a USB data line.
[0067] In (2) of the first step, the format type of the file in any program readable format of i_j is i_j.txt, i_j.xls or i_j.xlsx.
[0068] In the first step (3), the deep learning framework adopts the pytorch deep learning framework. a=80, the highest accuracy rate of the verification set is 94.57%. The save format of the convolutional neural network model is .tflite.
[0069] Depend on Figure 4 It can be seen that the convolutional neural network architecture consists of seven convolutional layers and a pooling layer, c represents t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More