

Robot tactile action recognition system and recognition method
A motion recognition and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of difficult to achieve tactile information acquisition, calculation, and cognition of the entire robot skin, inability to realize robot tactile intelligence, and occupation of robot controllers. Computing resources and other issues, to achieve the effect of reducing computing burden, good flexibility, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
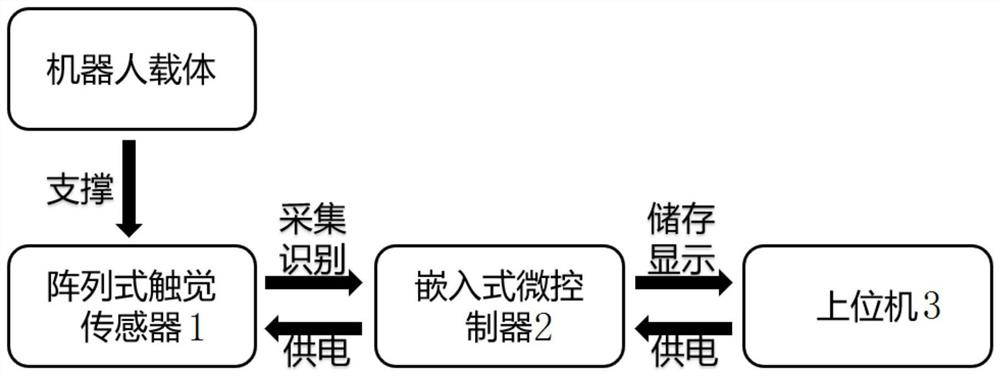
[0066] In this embodiment, in (1) of the first step, the carrier is the forearm of the robot, m=32, n=32, x=100, M=25, R=12, N=40 (20 times for the right hand, 20 times for the left hand ), P=12000, u=32. The 12 kinds of characteristic actions are pulled, pinched, pushed, grasped, grasped, poked, pulled, hit, stroked, scratched, patted, and slid. The embedded microcontroller 2 is connected with the host computer 3 through a USB data line.
[0067] In (2) of the first step, the format type of the file in any program readable format of i_j is i_j.txt, i_j.xls or i_j.xlsx.
[0068] In the first step (3), the deep learning framework adopts the pytorch deep learning framework. a=80, the highest accuracy rate of the verification set is 94.57%. The save format of the convolutional neural network model is .tflite.
[0069] Depend on Figure 4 It can be seen that the convolutional neural network architecture consists of seven convolutional layers and a pooling layer, c represents t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More