

System and method for comprehensively controlling spraying industrial robot based on virtual reality technology
A virtual reality technology, industrial robot technology, applied in instruments, injection devices, special data processing applications, etc., can solve the problems of monotonous color reflective characteristics, single system interaction mode, high computer performance requirements, shorten the development cycle, and achieve economic benefits. High, improve the effect of spraying accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
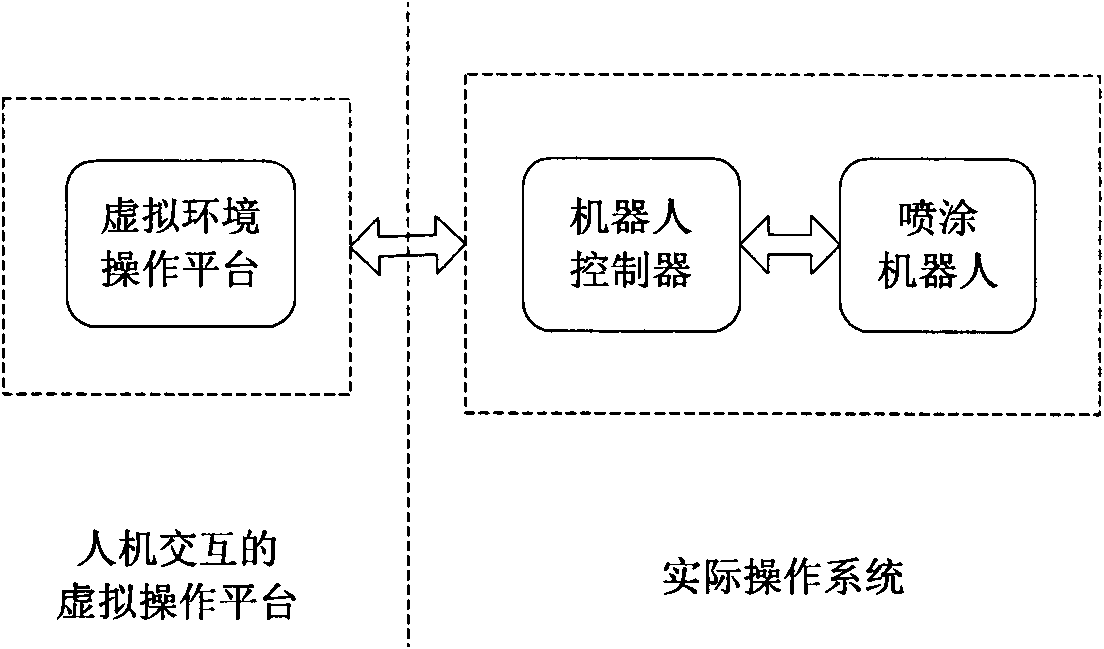
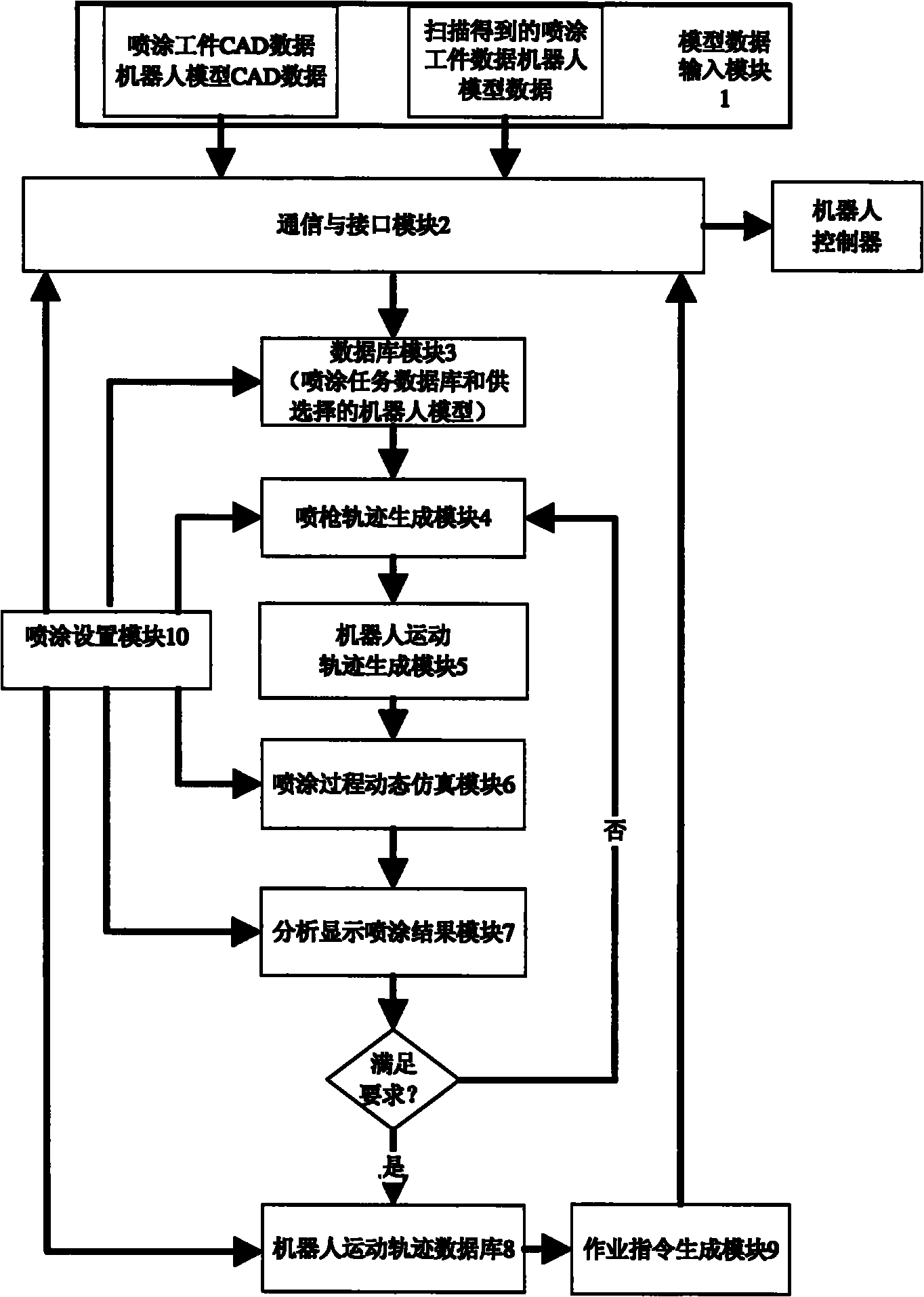
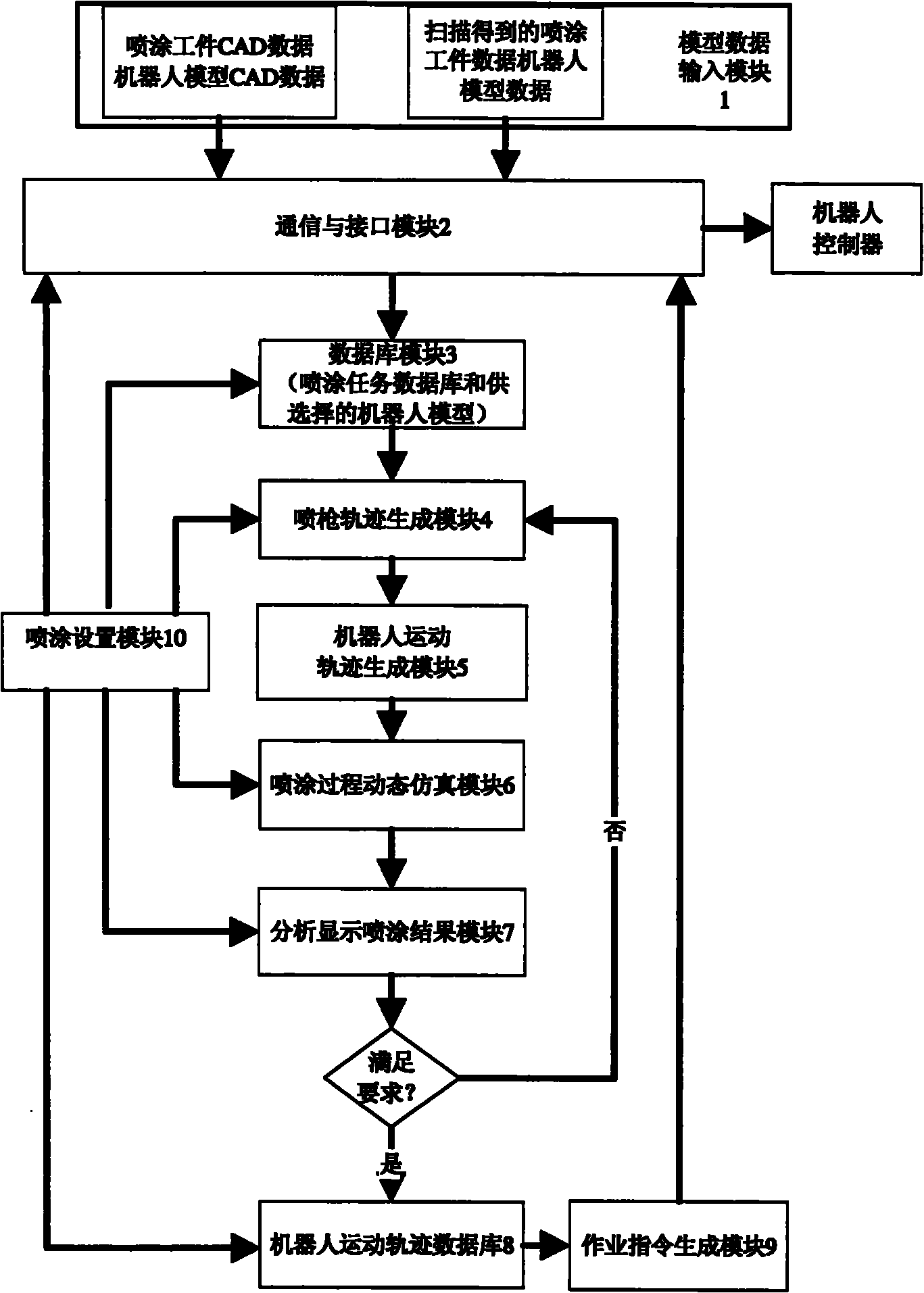
[0027] Such as figure 1 , figure 2 The present invention shown is an integrated control system for spraying industrial robots based on virtual reality technology, which is characterized in that it includes: a virtual environment operating platform, a robot controller and a spraying robot; the robot controller is connected with the spraying robot; the virtual environment The controller is connected with the robot controller;
[0028] Before giving a spraying task command, the user first sends this command to the virtual simulation system. Through the virtual simulation, the preview of the spraying process is completed. During the simulation process, the user can observe the spraying results of the virtual simulation system. If the spraying robot is running Stable and the spraying effect meets the requirements, the robot motion track data that meets this requirement will be stored and the corresponding robot file will be transmitted to the spraying robot controller of the actu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More