

Automatic line-grasping control method of deicing robot in high-voltage transmission line
A high-voltage transmission line and control method technology, applied in the direction of manipulators, electrical components, manufacturing tools, etc., can solve problems such as difficulty in ensuring control accuracy, complex algorithms, and inability to meet the real-time requirements of engineering applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The technical scheme and working process of the present invention will be further described below with specific embodiments in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited thereto.
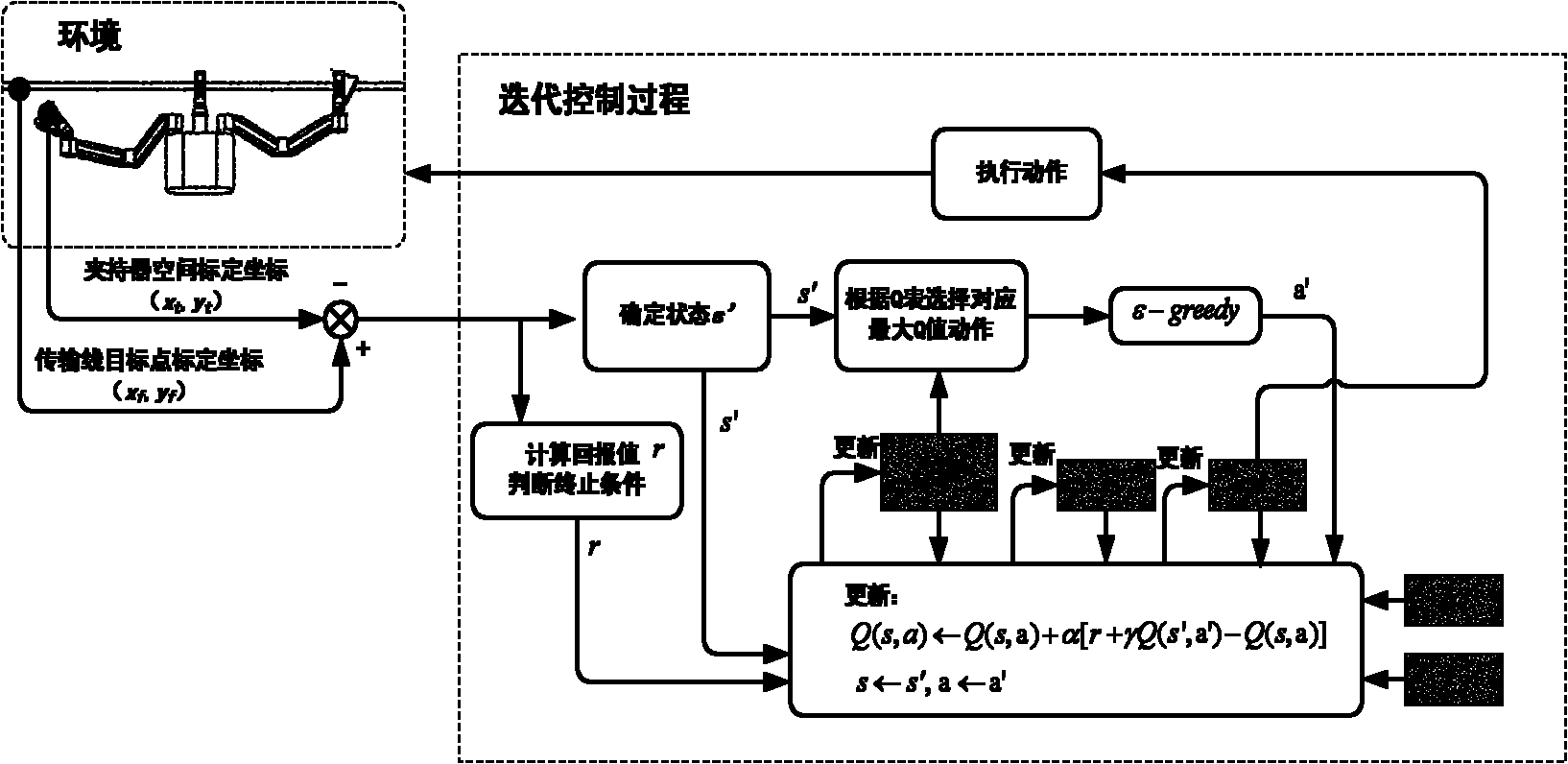
[0090] Taking a deicing robot with three mechanical arms as the control object, combined with the kinematics theory of the three-joint arm, to enhance the learning of the SARSA algorithm (the five-tuple (s, a, r, s′ used in each iteration of the algorithm) , a'), so the algorithm is named as the SARSA algorithm) to control the arm to catch the line. According to the characteristic that the transmission line is a flexible arc, the corresponding reward function is designed and its validity is verified. control process such as figure 1 , characterized in that the steps are:
[0091] 1. Establish an enhanced learning system.
[0092] The environment in which the deicing robot grasps the line can be described as a finite-state d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More