

Parallel multi-degree-of-freedom ankle joint rehabilitation trainer
A degree of freedom, ankle joint technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of difficult to meet the ankle joint rehabilitation training, the rotation center does not coincide with the ankle joint, difficult ankle joint rehabilitation training and other problems, to achieve good rigidity , high carrying capacity, the effect of reducing the burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the scope of protection of the present invention is not limited to the following the described embodiment.
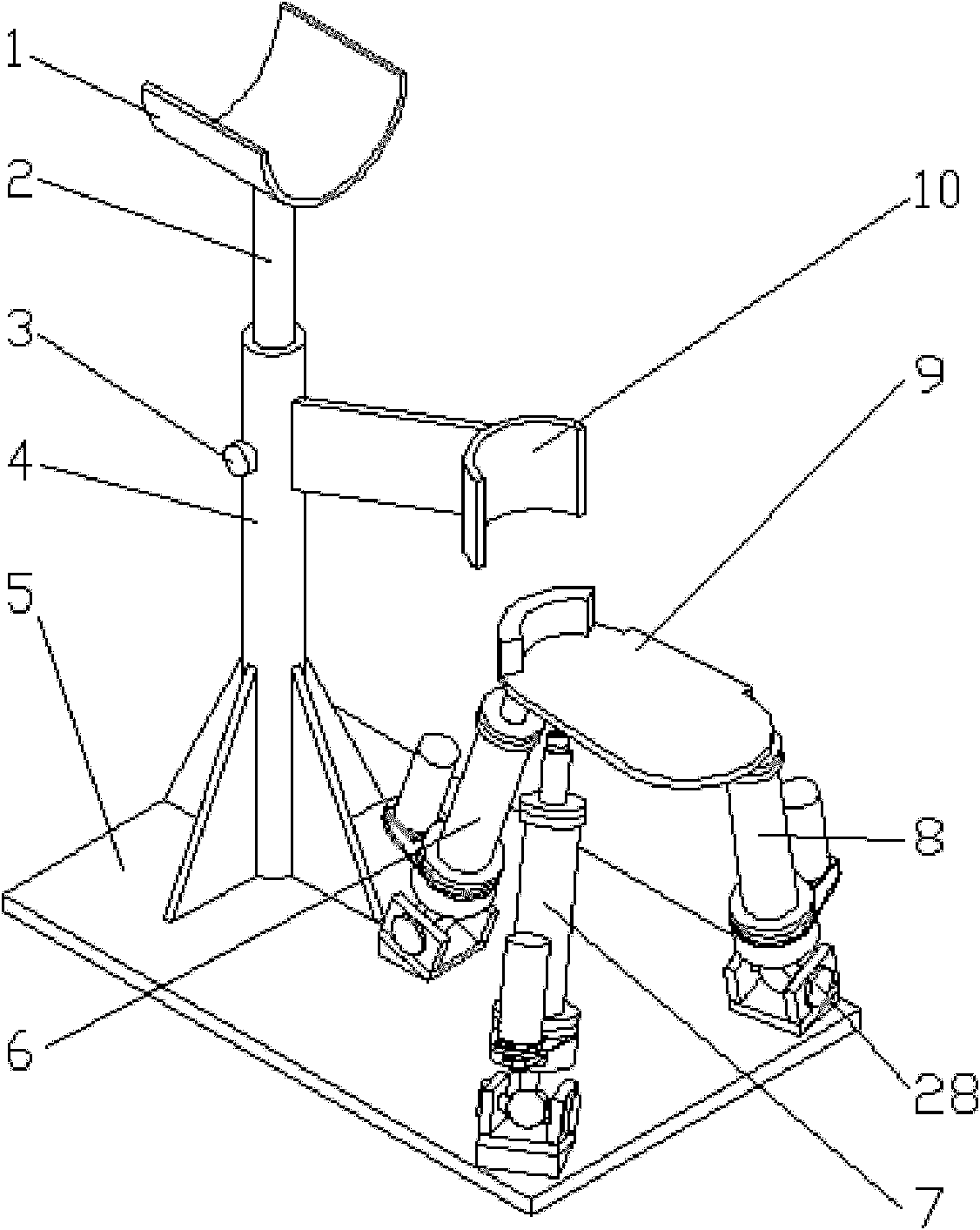
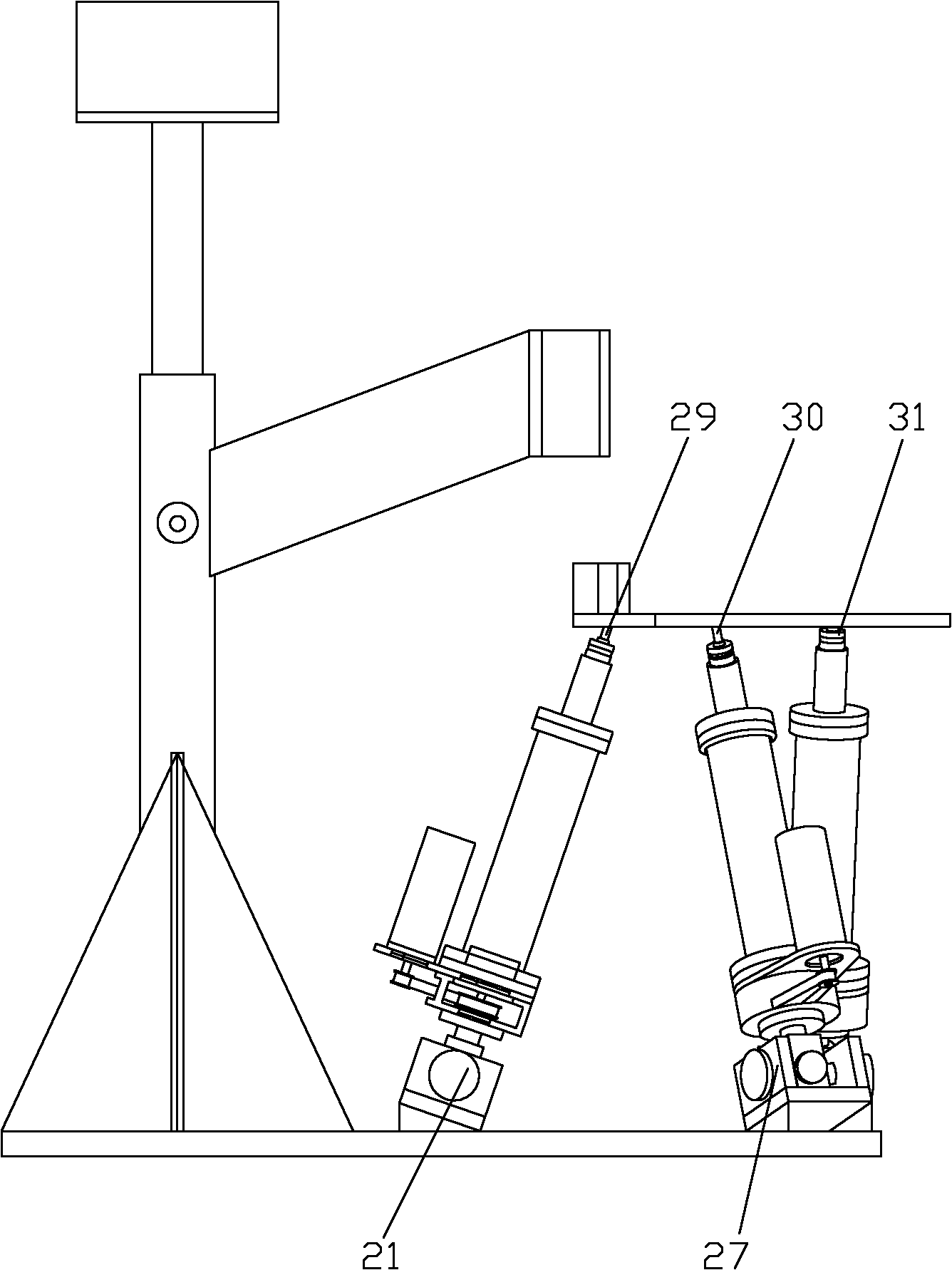
[0011] As shown in Figure 1, this embodiment includes: thigh support seat 1, thigh support seat inner rod 2, locking screw 3, thigh support seat outer rod 4, calf connecting sleeve 10, sole support plate 9, first movement support Chain 6, the second movement branch chain 7, the third movement branch chain 8, and the base plate 5, wherein: the outer rod 4 of the thigh support seat is fixedly connected with the base plate 5; the thigh support seat 1 is fixedly connected with the inner rod 2 of the thigh support seat, and the thigh support seat The inner rod 2 of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More