

3-PRP planar three-degree-of-freedom parallel mechanism positioning method
A positioning method and technology with degrees of freedom, applied in position/direction control, non-electric variable control, instruments, etc., can solve problems such as no positioning method solution and difficult positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
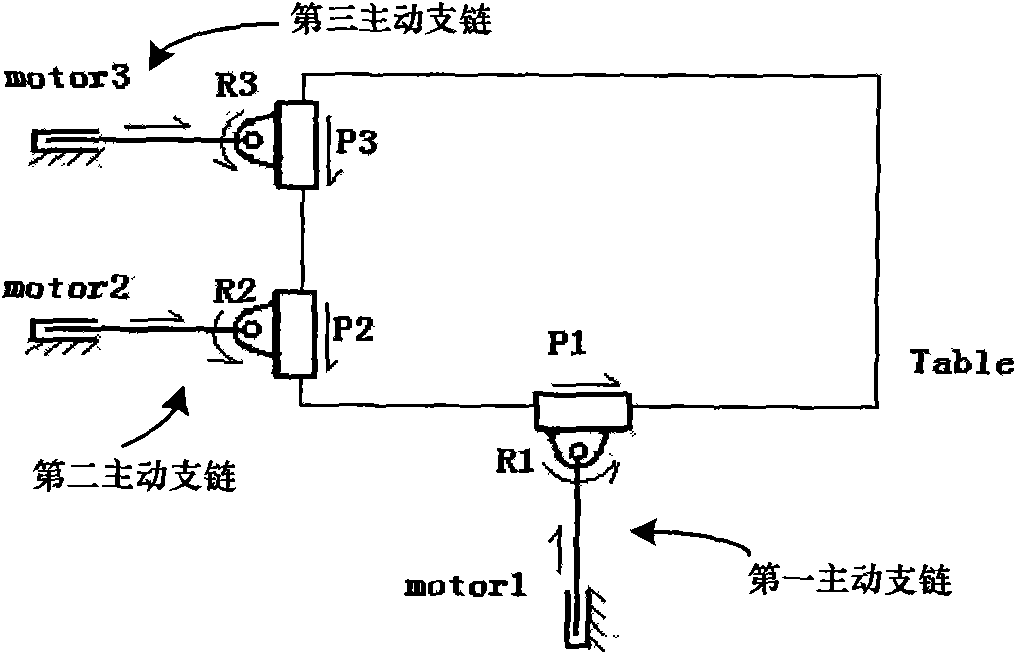
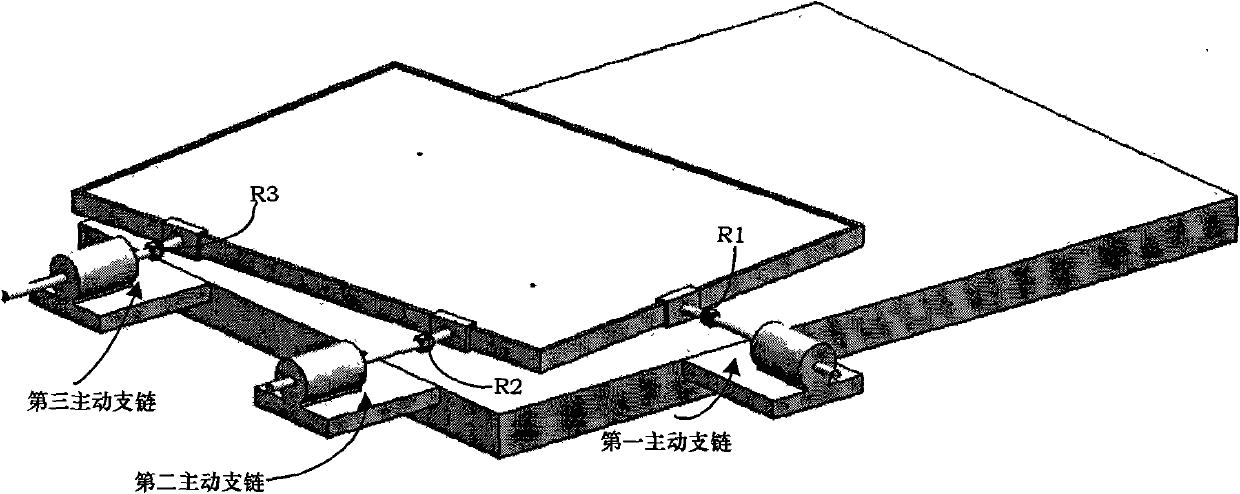
[0052] Such as figure 1 Shown is a schematic diagram of the structure of a 3-PRP plane three-degree-of-freedom parallel mechanism. There is a movable platform Table on the fixed plane. The Table is connected to the fixed plane through three active branch chains. Each active branch chain is composed of an active sliding pair and a rotating hinge. , Passive sliding pair composition, rotating hinge is exactly rotating pair. The first active branch chain is composed of the active sliding pair motor1, the rotating pair R1 and the passive sliding pair P1; the second active branch chain is composed of the active sliding pair motor2, the rotating pair R2 and the passive sliding pair P2; the third active branch chain is composed of the active sliding pair It consists of auxiliary motor3, rotating pair R3 and passive sliding pair P3. figure 2 It is a schemat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More