

Method for controlling density of group mobile robots in any formation
A mobile robot and density control technology, applied in non-electric variable control, vehicle position/route/height control, position/direction control, etc., can solve problems such as robot density maintenance, robot density control and formation change conflicts, and achieve Guaranteed communication and perception range, controllable robot density, and high communication and perception range effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In the method for controlling the density of a group of mobile robots in any formation, the mobile robot has the ability to perceive other robots and obstacles in the neighborhood, and has the ability to communicate with its partner robots. Its model is as follows:
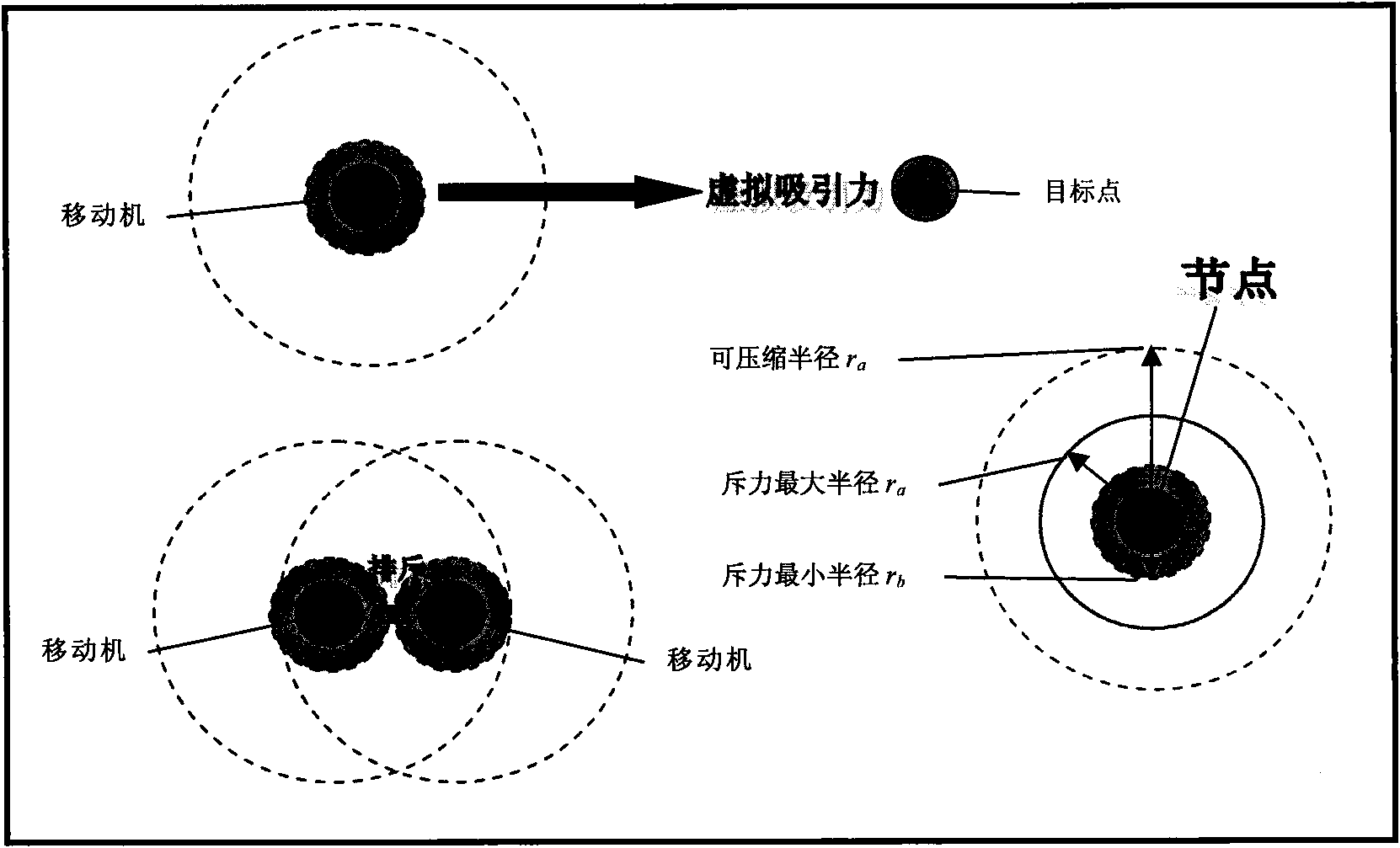
[0019] First, a finite compression spring model of the mobile robot is established. According to the working characteristics of the mobile robot, the limited compression spring model (limited compression range is an annular zone) is used to establish the action field of the mobile robot. The principle is as follows: figure 1 Shown:
[0020] 1) After artificially setting the position of the target point, a target attraction virtual force is applied to the mobile robot. The magnitude of the attraction force of the mobile robot to the target point is proportional to the distance, and the direction is the direction of the connecting line between the robot and the target point.
[0021] 2) When the distance be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More