

Lower limb multi-training mode rehabilitation robot
A rehabilitation robot and training mode technology, which is applied to muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve the problems of untrained or corrected movements, less robot degrees of freedom, and single lower limb rehabilitation robot movement patterns. Achieve the effect of compact structure, full space utilization and compact overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
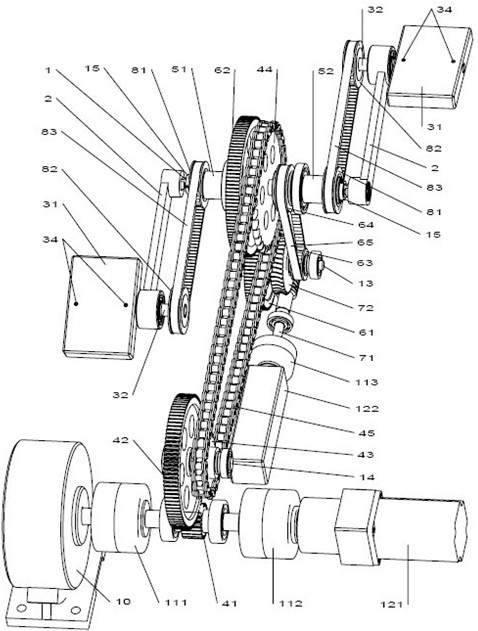
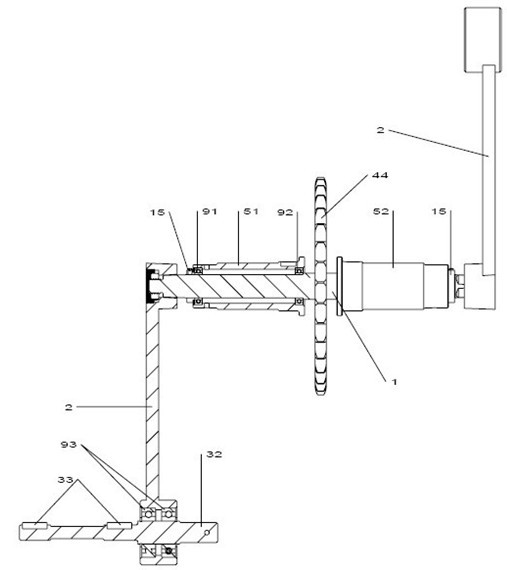
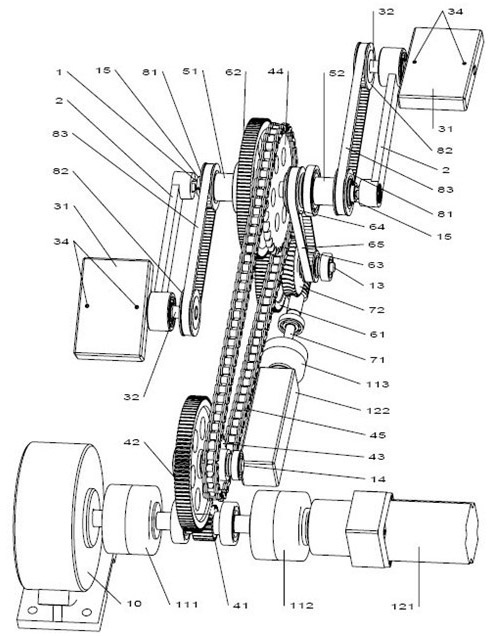
[0027] like figure 1 As shown, the lower limb multi-training mode rehabilitation robot includes a pedal rotation mechanism, a knee-hip joint movement mechanism and an ankle joint movement mechanism.
[0028] The pedal rotation mechanism includes a pedal 31 and a pedal shaft 32 . One end of the pedal shaft 32 is connected with the pedal 31 through a flat key 33 and a set screw 34. The flat key 33 is used for radial positioning of the connection, and the set screw 34 is used for axial positioning of the connection. The other end of the pedal shaft 32 is connected to the knee hip joint. The kinematic mechanism is connected with the ankle joint kinematic mechanism. There are two groups of pedal rotating mechanisms in this device.
[0029] The knee-hip joint motion mechanism includes a center shaft 1 , two connecting rods 2 , a first clutch 111 , a magn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More