

Self-adaptive filtering method based on different measuring characteristics of GPS (Global Positioning System)/INS (Inertial Navigation System) integrated navigation system
An integrated navigation system and adaptive filtering technology, which is applied in the direction of measuring devices, radio wave measurement systems, satellite radio beacon positioning systems, etc., can solve the problems affecting the filtering accuracy, theoretical research stage, and not widely used, so as to improve positioning Accuracy, simple method, real-time tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
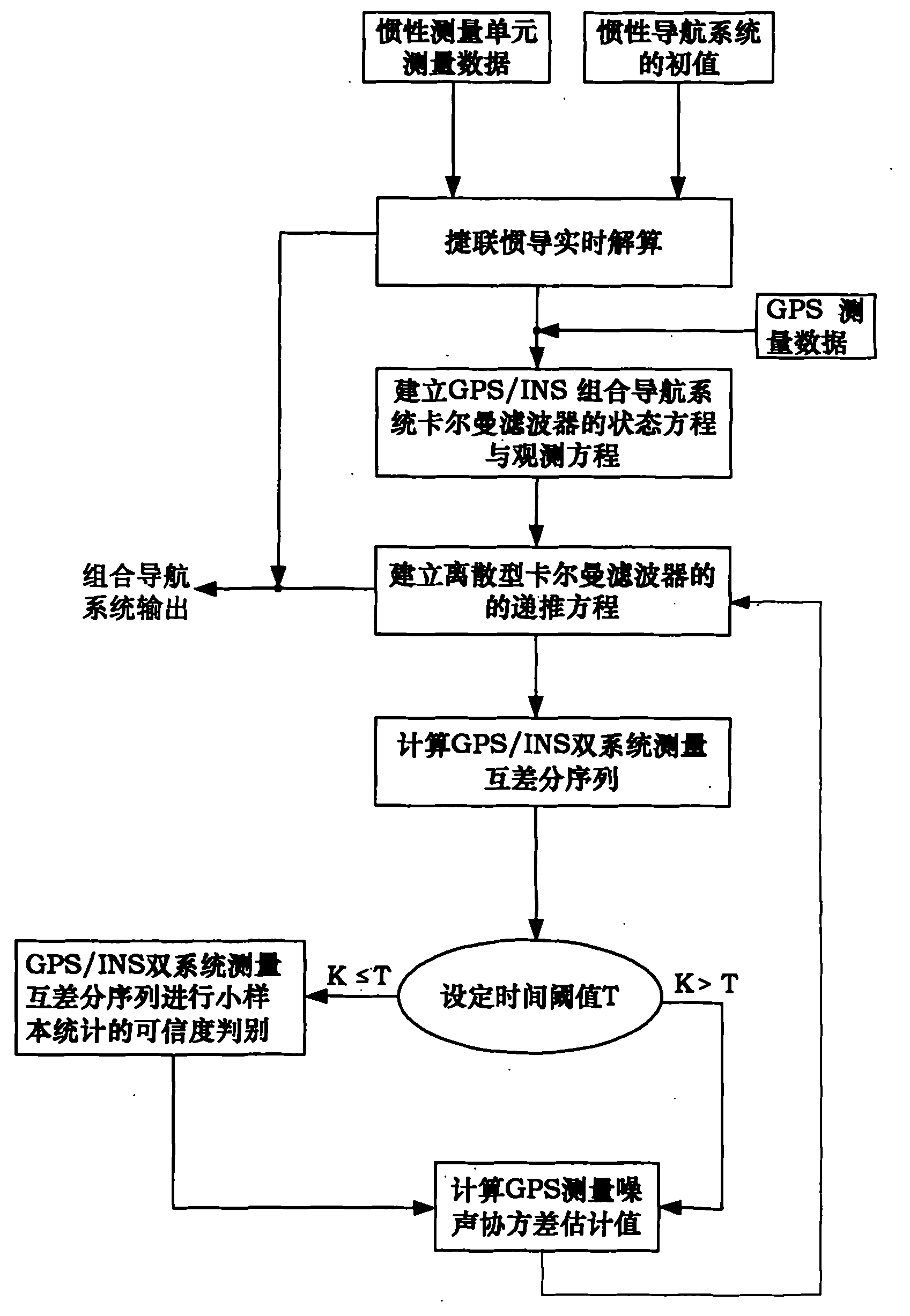
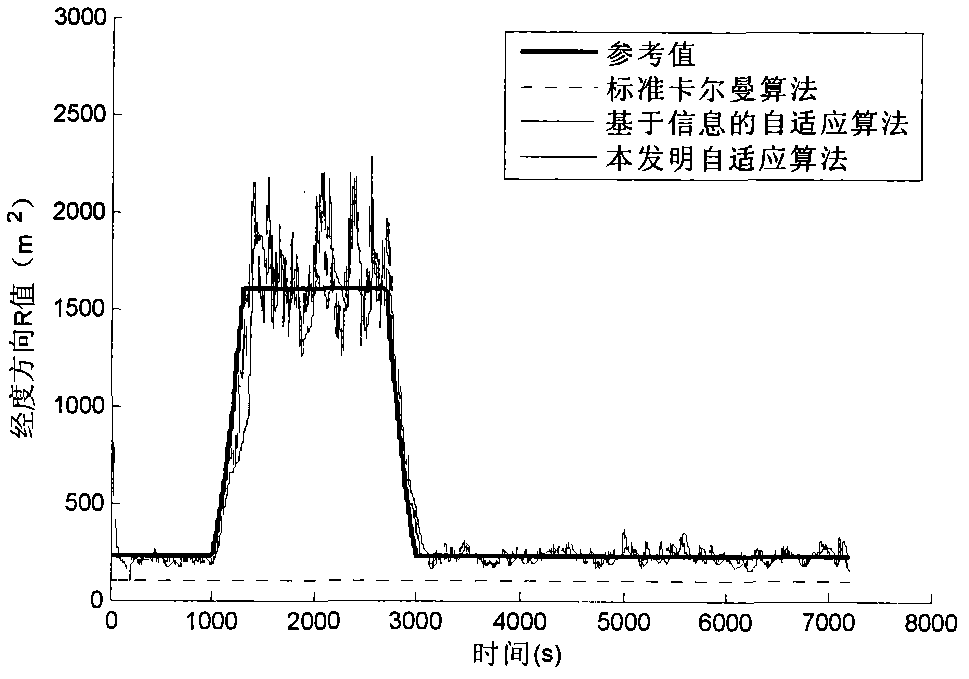
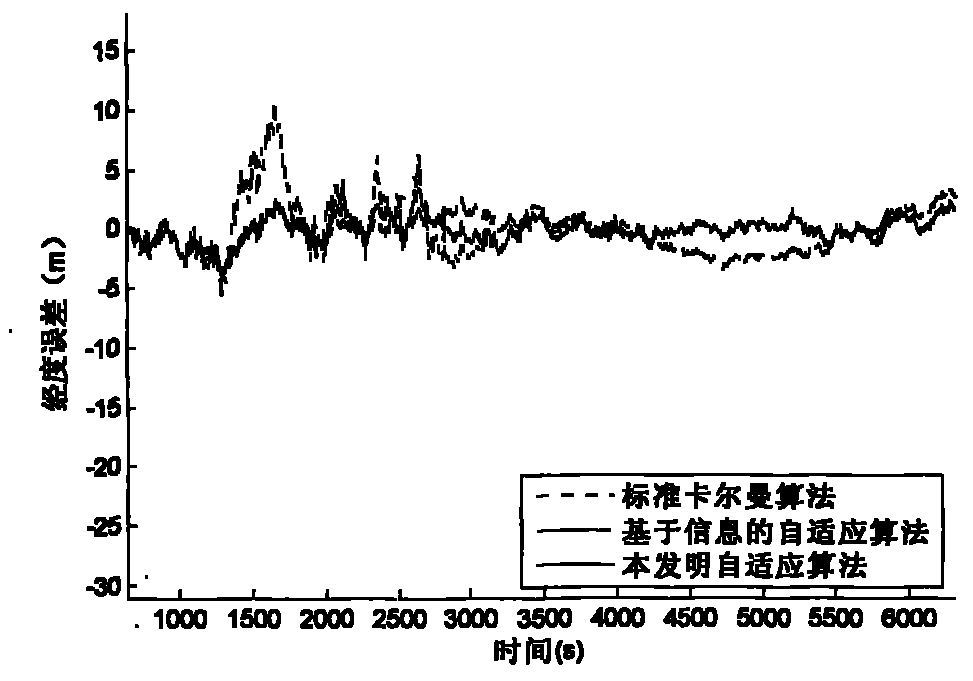
[0027] The initial position of the carrier in this embodiment is 116° east longitude, 39.2° north latitude, 1000m altitude, 300m / s speed, 35° course angle, and 7200s flight. The random constant drift of the gyro is 0.01° / h, the random drift is 0.005° / h, the random constant drift of the accelerometer is 100μg, and the random drift is 50μg. The GPS speed error is 0.1m / s, the altitude error is 120m, and the latitude and longitude error is 15m. In order to investigate the anti-interference effect of GPS / INS integrated navigation system on GPS measurement, the GPS latitude and longitude error increases to 40m in the period of 1000s-3000s, as Figure 2a , 2c shown. Apply a kind of adaptive filtering method based on different measurement characteristics of GPS / INS integrated navigation system provided by the present invention, such as figure 1 As...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More