

Rotational joint module of modularized reconfigurable robot
A technology for reconstructing robots and rotating joints, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of not considering braking and mechanical limit, low precision, complicated connection and installation, etc., to achieve auxiliary position measurement and connection. And the effect of accurate positioning and increasing output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
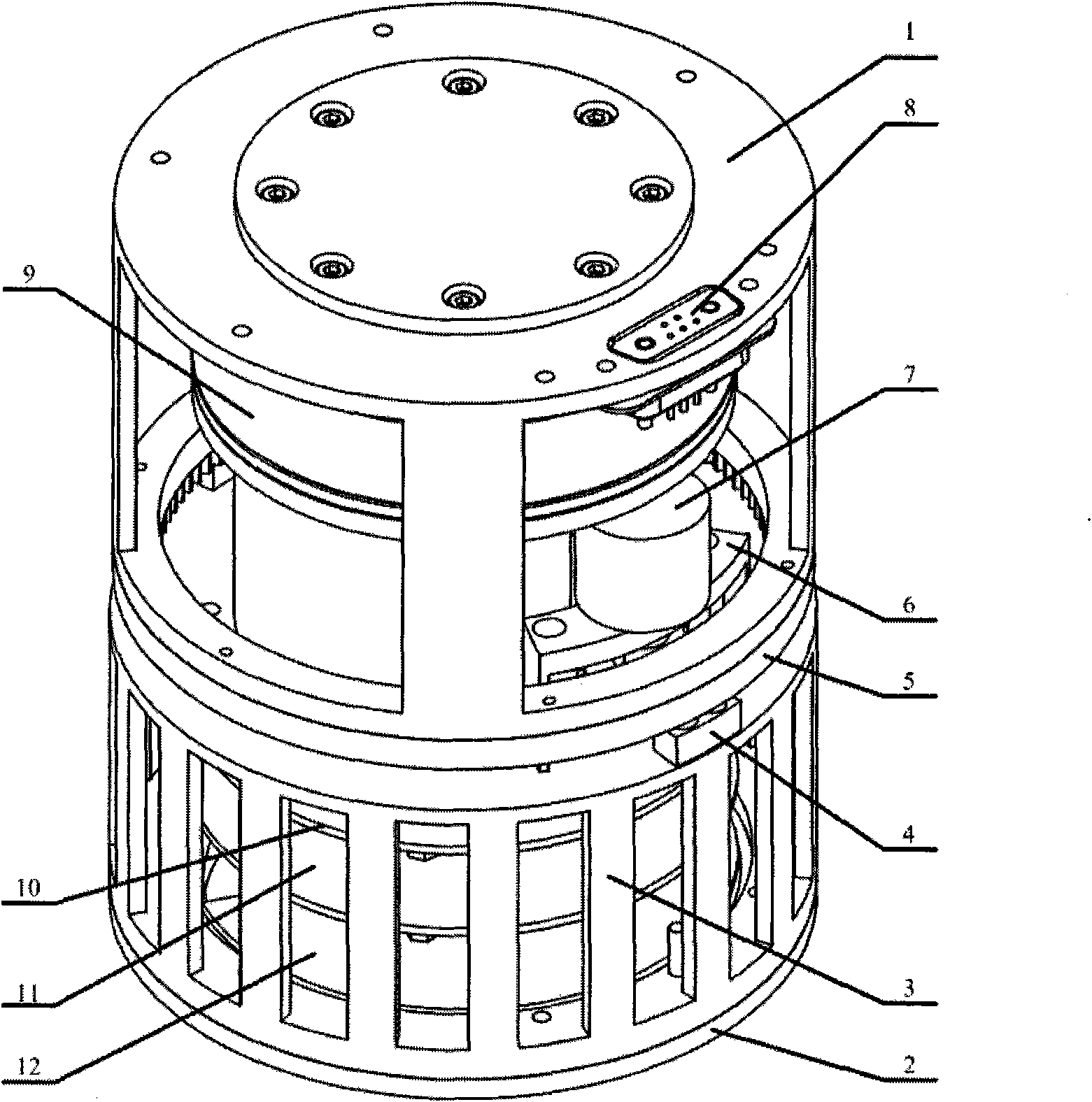
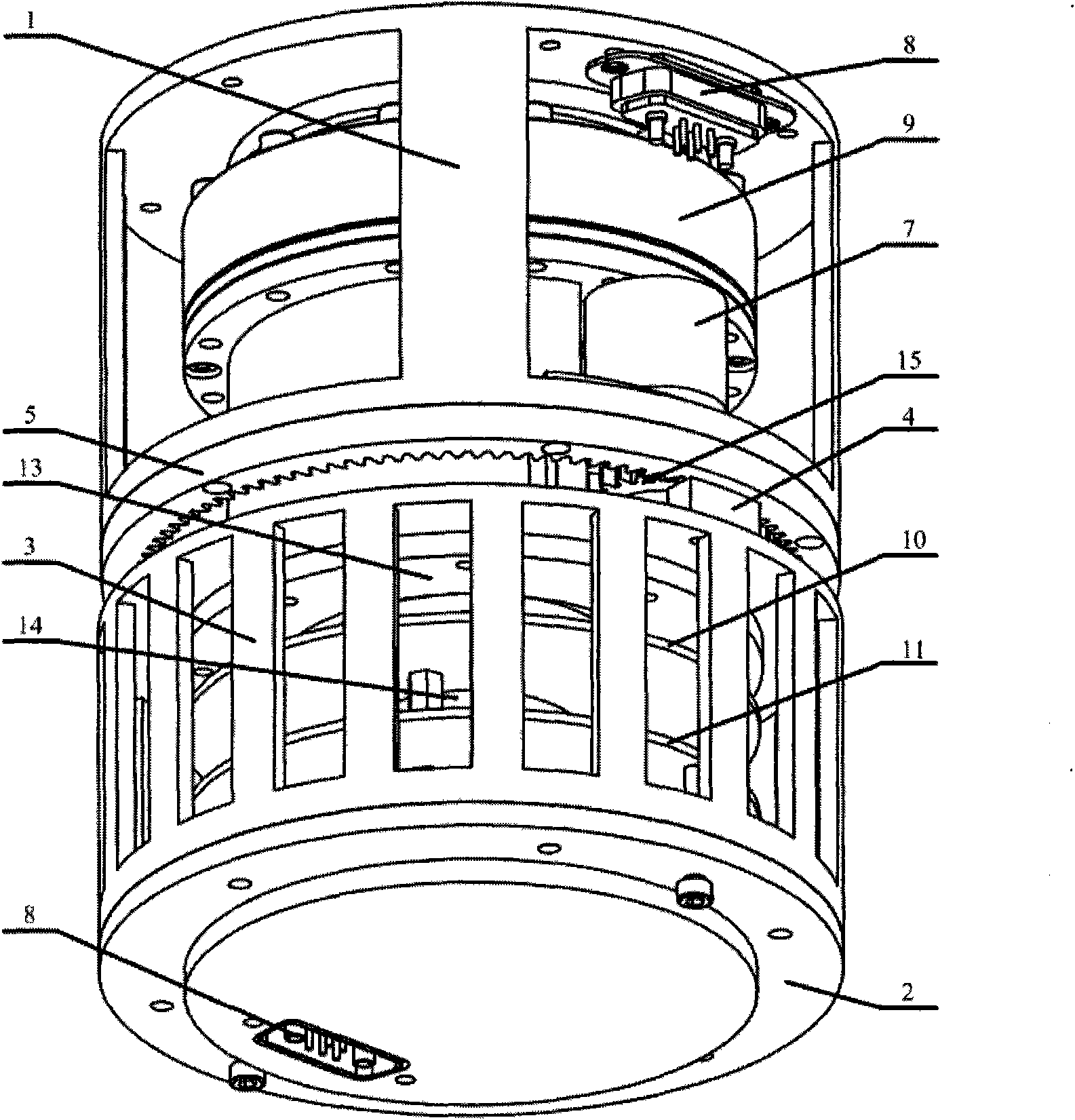
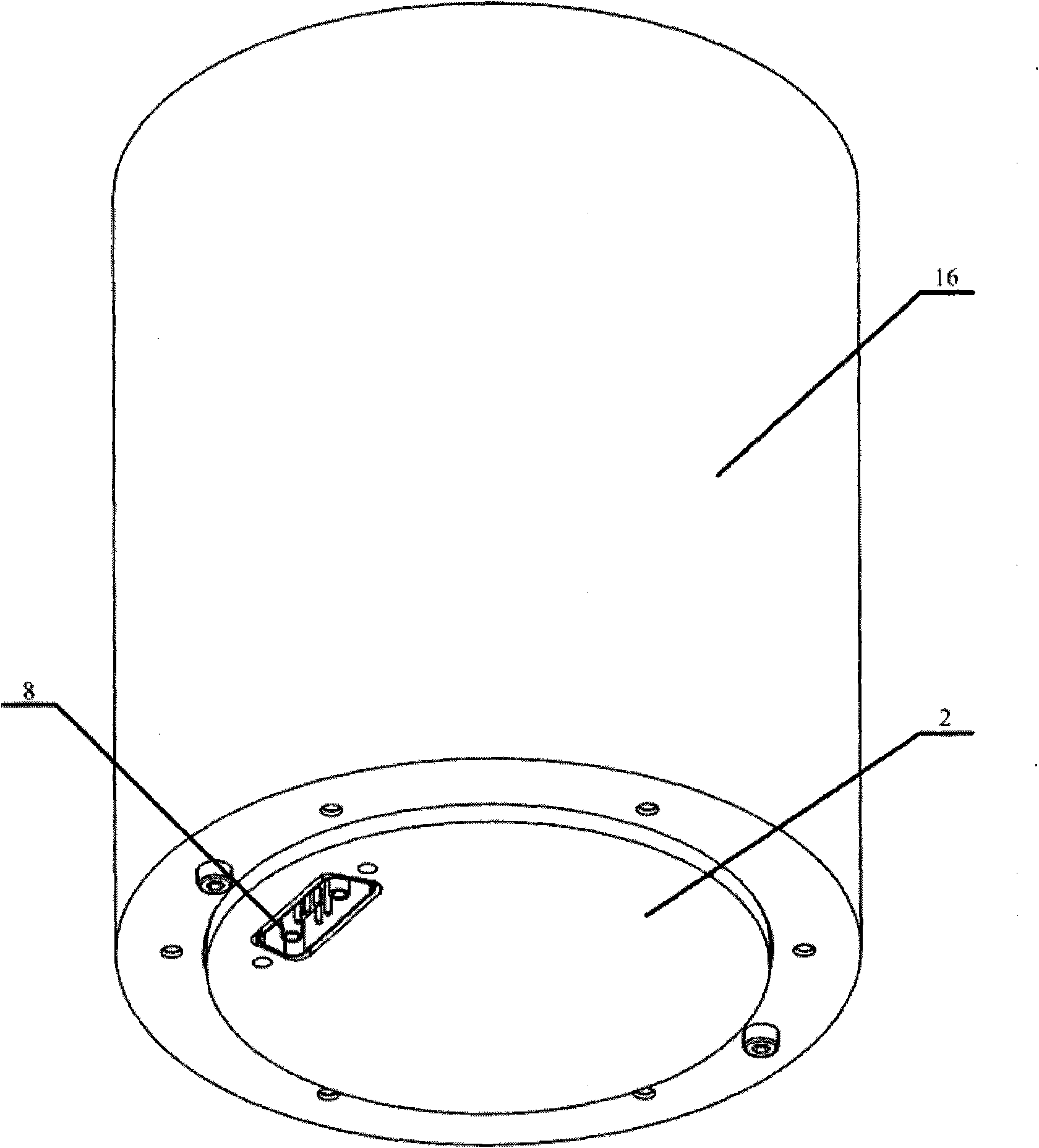
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
[0036] refer to Figure 1 to Figure 14 , the present invention includes a cage support 3, an upper end cover 1, a lower end cover 2, a DC brushless motor 18, a planetary reducer 17, an electromagnetic brake 19, an incremental code disc 20, and also includes a harmonic reducer 9, a rotary potential Meter 7, pinion 15, ring gear 5, including mechanical limiter and electrical limiter, DSP control circuit board, drive circuit board, power conversion circuit board, D-type connector, outer cover, and the upper end cover 1 is installed on The output end of the harmonic reducer 9, the harmonic reducer 9 is installed on the cage support 3, the output shaft of the planetary reducer 17 is installed at the input end of the harmonic reducer 9, the planetary reducer 17 is installed on the cage support 3, the front output shaft of the DC brushless motor 18 is installed at the input ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More