

Global path planning method based on fuzzy topological map under large-scale environment
A global path planning and topology map technology, applied in navigation, instrumentation, surveying and navigation, etc., to solve path planning problems, facilitate understanding and identification, and construct simple and easy-to-understand effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following drawings and examples further illustrate the present invention.
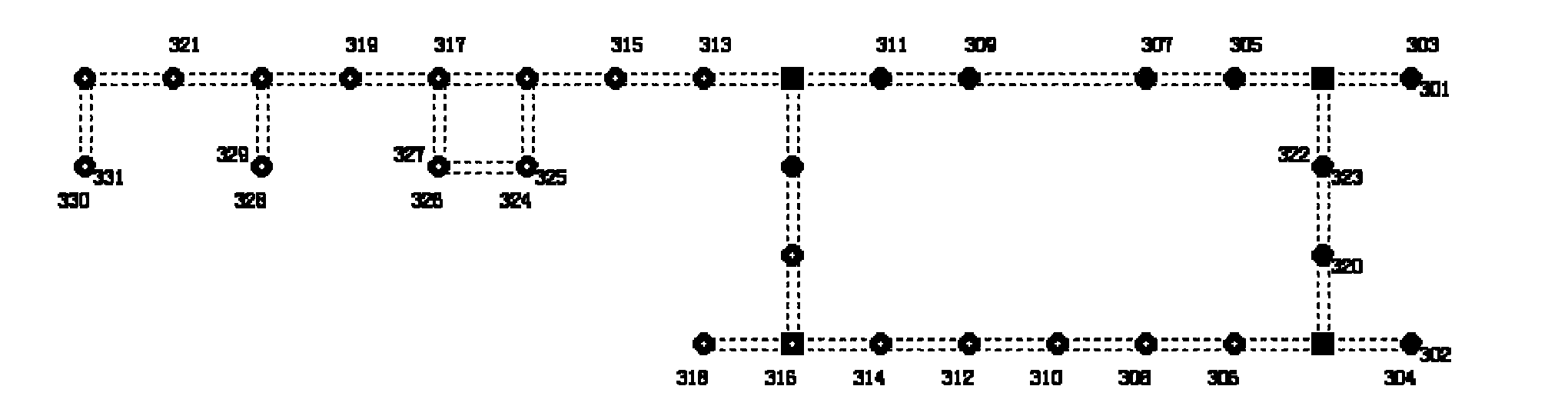
[0041] The first is to build a map. Since the corridor is a large-scale and structured environment, constructing a topological map with node coordinate information is a traditional environmental modeling method. However, this method needs to artificially provide accurate location information of key nodes in the environment, which reduces the autonomy of the robot. Therefore, in view of the special structure of the environment and typical environmental characteristics, a method for patrol management and path planning is proposed and constructed, based on "distributed information representation "Global fuzzy topological semantic map.
[0042]Corridor intersections, corners, room doors, elevator entrances, stairways, etc. are used as important locations, represented by nodes, and connected by lines to represent the connection between two nodes. For multiple doors with similar or opposite posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More