

Mater-slave type co-evolution method for path planning of mobile manipulator in three-dimensional space
A mobile manipulator and path planning technology, applied in manipulators, program-controlled manipulators, genetic models, etc., can solve problems such as the inability to "joint population" evolution operations, and achieve the effect of excellent overall performance and collision prevention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
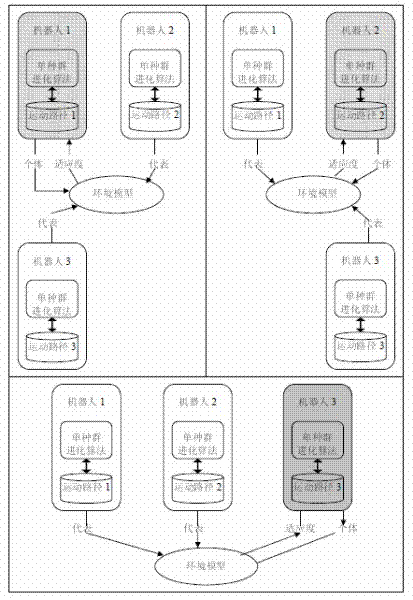
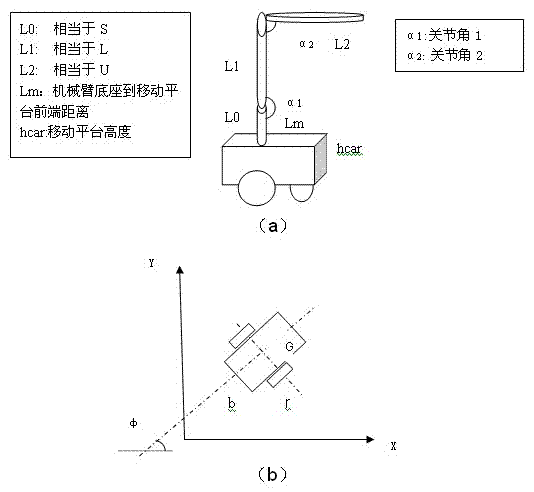
[0022] The patent of the present invention uses the master-slave co-evolution method to realize the path planning of the mobile manipulator in three-dimensional space. The principle of this method is: imitating the social activities of human beings, there are always some people in the dominant position in group activities, leading the development direction of the whole group, and the other part of people is in a subordinate position, helping to promote the development of the group. Moreover, this status is not constant, but changes with the environment faced and the contribution of personal experience to the group. In the mobile manipulator described in this paper, the mobile platform and the manipulator are included, and the roles of leader and assistant are assigned to these two subsystems.
[0023] Firstly, the mobile platform acts as the leader, completes the path planning on the ground, and obtains an optimal path. Then the assistant-the robotic arm completes its own tas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More