

Rapid and accurate registration method of dense point cloud model
A precise registration and dense point cloud technology, applied in the field of coordinate systems, can solve problems such as registration accuracy and registration speed, and achieve the effect of both registration accuracy and registration speed and fast registration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
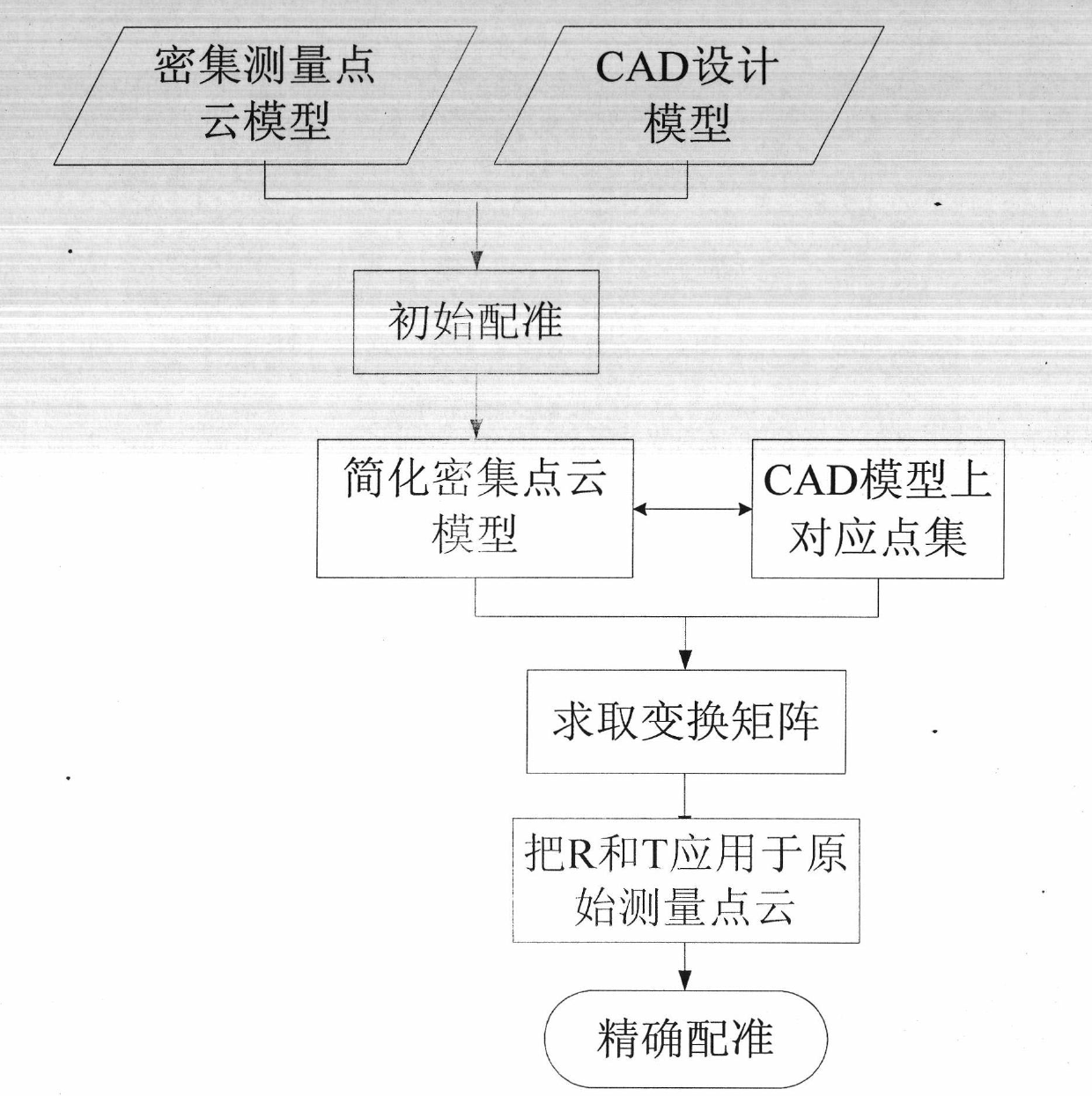
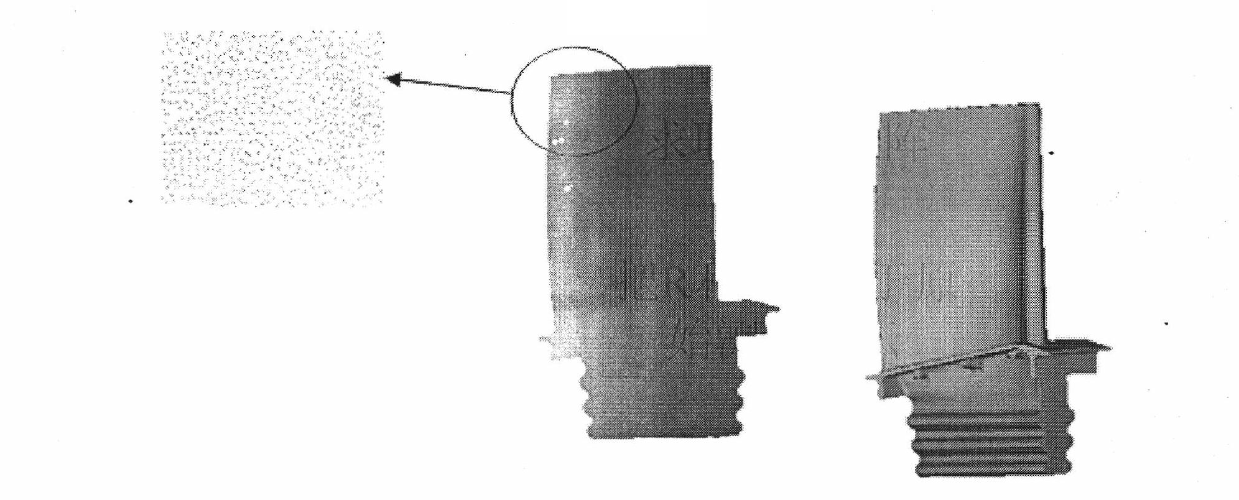
[0025] The following combines a dense point cloud model of a turbine blade (1392396 points) and a CAD model (see figure 2 ), set forth in detail the operating steps of the present invention.
[0026] step 1
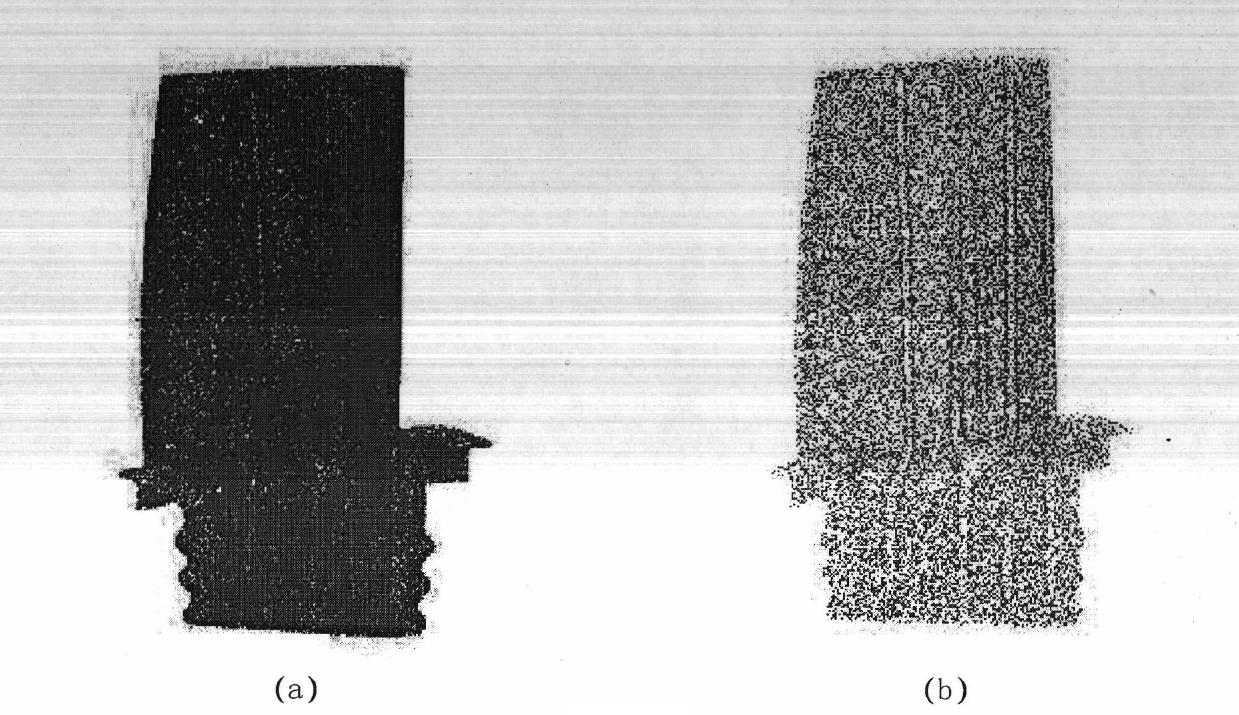
[0027] The initial registration of the dense point cloud model of the turbine blade and the CAD model is realized by the alignment method, and any three sets of corresponding point pairs (P 1 , Q 1 ), (P 2 , Q 2 ), (P 3 , Q 3 ), where P 1 , P 2 , P 3 not on the same plane. make as vector v 3 and w 3 , make vector vector v 2 and w 2 , v 1 , v 2 and v 3 form an orthogonal coordinate system, expressed as a unit vector empathy Measure any point P in the point cloud model i Transform to the corresponding point Q i The relational expression is: Q i =RP i +T, where R=[w][v] -1 , T=Q 1-[w][v] -1 P 1 . see results Figure 4 (a).
[0028] step 2
[0029] Properly simplify the initial registration point cloud data obtained in step 1, use the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More