

Crane obstacle-avoidance system based on stereoscopic vision
A technology of stereo vision and binocular stereo vision, applied in photogrammetry/video metrology, image data processing, measuring devices, etc., can solve problems such as unreachable control of the crane system, high risk, and prone to collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
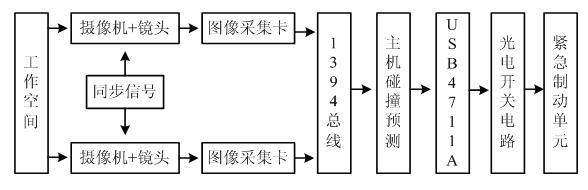
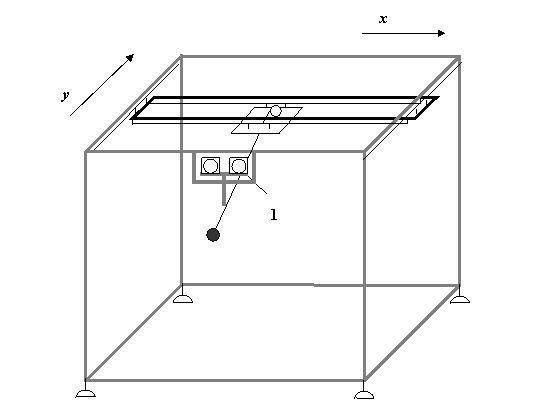
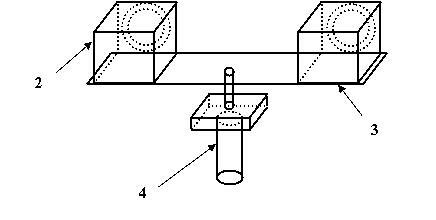
[0089] The hardware structure of the system involved in the present invention is as figure 1 shown. in cranes (such as figure 2 ) in the working space, through the camera fixing bracket 1 (such as image 3 ) Fix the left and right cameras on the crane, and adjust the camera angle to make the observation range as large as possible. According to the synchronous signal, the left and right cameras shoot the working scene of the crane at the same time, and the images are connected to the host computer through the image acquisition card and the 1394 bus. The host performs stereo vision system calibration, image processing, reconstruction of static obstacles in the crane working space, detection and tracking of dynamic obstacles, tracking of loads, estimation of speed information, position information and size information of moving objects, generation of collision models, and collision prediction. When a collision is detected, a trigger signal is sent through the device USB4711A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More