

CANopen (Controller Area Network open)-based distributed type modularized mechanical arm system
A robotic arm and modular technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as USB failing to meet industrial standards, equipment unrecognizable, affecting applications, etc., to shorten the design cycle, facilitate expansion, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
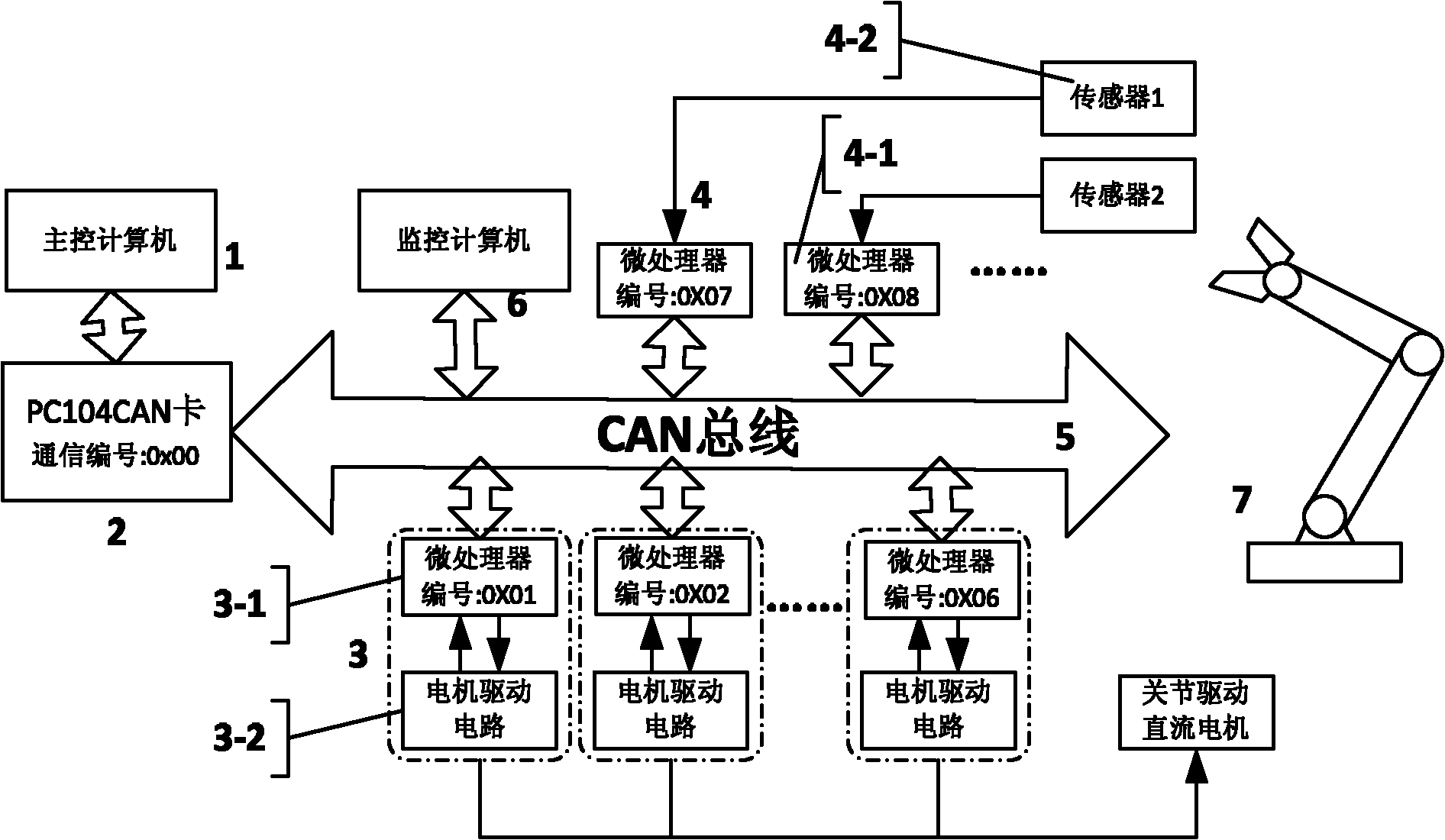
[0019] Such as figure 1As shown, this embodiment includes: a main control module 1, a bus interface module 2, a motor drive module 3, a sensor module 4, a communication bus 5, a monitoring module 6 and a mechanical arm 7, wherein: the main control module 1 and the bus interface module 2 Connect to transmit control information and receive feedback arm status information from the bus interface module 2. The bus interface module 2 is connected to the CAN bus and sends the control information issued by the main control module 1 to the CAN bus. The bus interface module 2 Receive feedback information from the CAN bus an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More