

Group animation motion control system and method
A motion control system and motion control technology, applied in animation production, program control device, image data processing, etc., can solve the problems of less real-time interactive control, ignoring autonomy requirements, lack of animator interactive control, etc., to improve computing efficiency , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The invention will be described in further detail below in conjunction with the accompanying drawings.
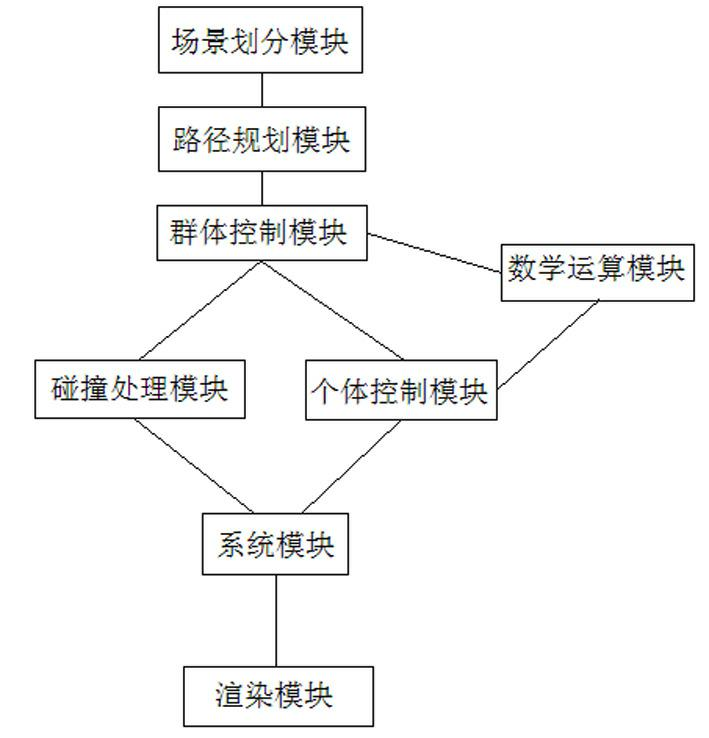
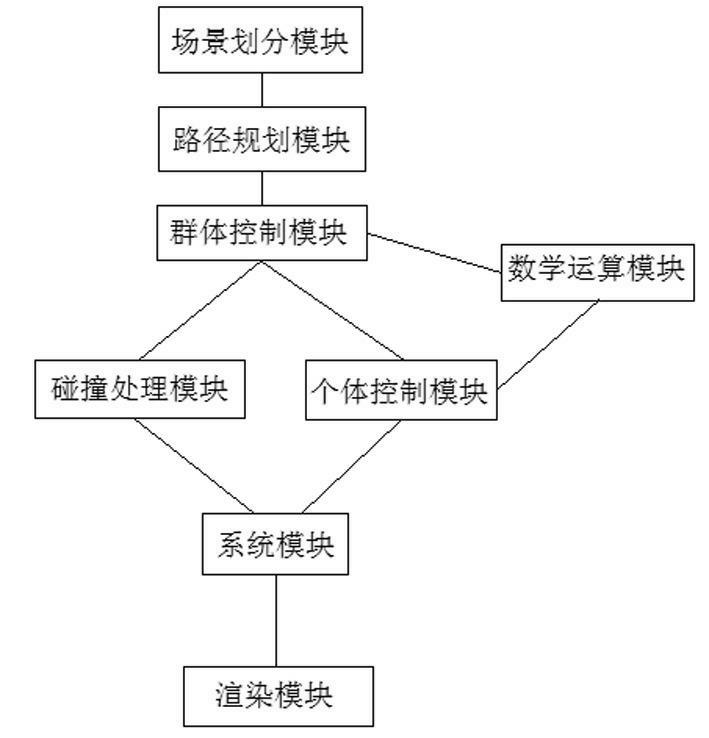
[0033] Such as figure 1 Block diagram for controlling the motion control system for swarm animation. The system includes: a scene division module, a path planning module, a group control module, an individual control module, a collision processing module, a mathematical operation module, a system module and a rendering module, wherein the scene division module, the path planning module and the group control module are sequentially connected, The input end of the collision processing module and the input end of the individual control module are respectively connected to the output end of the group control module, the output end of the collision processing module and the output end of the individual control module are respectively connected to the input end of the system module, the system module and the rendering The modules are connected sequentially, and the mathem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More