

A method of combining svm and lidar to detect unstructured road boundaries
An unstructured and lidar technology, applied in the direction of instrumentation, computing, character and pattern recognition, etc., can solve problems that are not suitable for unstructured road boundary detection, and overcome the shortcomings of visual road detection, high accuracy rate, and algorithm good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] specific implementation plan
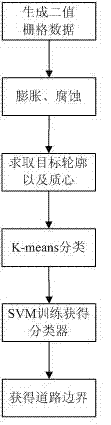
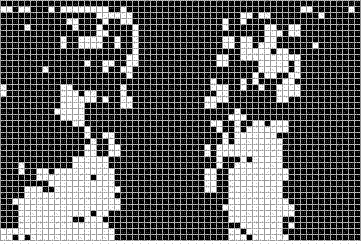
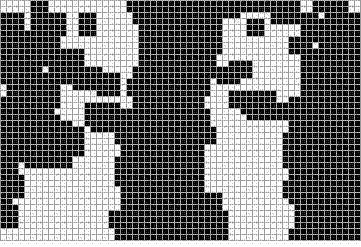
[0021] A method for detecting unstructured road boundaries in combination with SVM and laser radar of the present invention is to analyze and process the data collected by the vehicle-mounted 64-line laser radar during the driving process of an intelligent vehicle to generate binary grid data; Expand and corrode the grid data to make the representation of obstacles as connected as possible; in order to reduce the amount of processing data, obtain the contour of the obstacle target, record these contour points and calculate the center of mass; then use the K-means algorithm to calculate the obstacle The material center is used to classify the target objects into two categories; the contour points of the two types of targets can be trained by SVM to obtain the road boundary. combine figure 1 , including the following steps:
[0022] Step 1. Install a 64-line laser radar on the top of the vehicle, calibrate the radar and collect the three-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More