

Adaptive control system based on radial basis function (RBF) neural network sliding mode control for micro-electromechanical system (MEMS) gyroscope
An adaptive control, neural network technology, applied in the field of automatic control systems, can solve problems such as inconvenience and lack of driving gyroscopes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] For further elaborating the technical means and effect that the present invention takes for reaching the predetermined invention purpose, below in conjunction with accompanying drawing and preferred embodiment, to the self-adaptive control of the MEMS gyroscope based on RBF neural network sliding mode control that proposes according to the present invention The specific implementation, structure, features and functions of the system are described in detail.
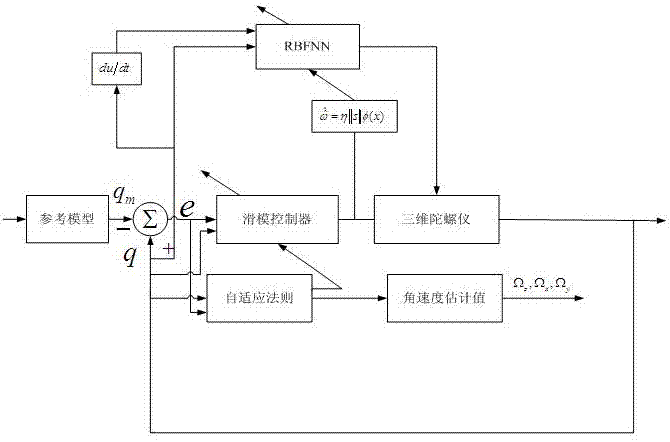
[0025] Such as figure 1 As shown, the adaptive sliding mode variable structure controller in this example is designed as:
[0026] The dynamic equation of the three-axis gyroscope is:
[0027] m x . . + d xx x . + d xy y . + d xz ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More