

Method for controlling robot based on visual sense
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems that cannot meet the requirements of manipulator control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
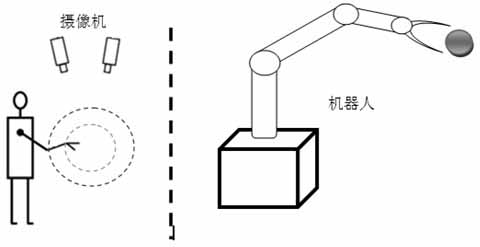
[0069] The present invention will be described in further detail below in conjunction with embodiment and accompanying drawing, but the embodiment of the present invention is not limited to this embodiment, figure 1 Shown is a frame model diagram.
[0070] According to the vision-based control robot method, it includes the following steps:
[0071] S1. Acquiring images of human hand gestures through a camera;
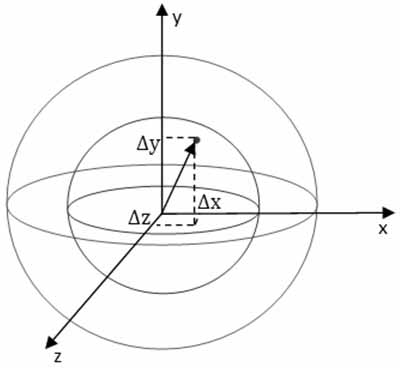
[0072] S2, extracting the feature points of the human hand in the gesture image;
[0073] S3. Perform three-dimensional reconstruction on the feature points to obtain the positional relationship of the hand feature points in three-dimensional space;
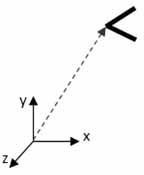
[0074] S4. Transform the coordinate points corresponding to the feature points of the human hand into the base coordinates of the robot;
[0075] S5. Using the pose relationship of the human hand in the robot base coordinate system to perform inverse calculation to obtain the joint angle of the robot;
[0076] S6. Usin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More