

Leg joint for quadruped robot
A quadruped robot and robot technology, applied in the field of lifesaving and machinery, can solve problems such as inability to stand still, slow movement speed, poor load capacity, etc., and achieve the effect of stable static standing ability, large load capacity, and strong load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
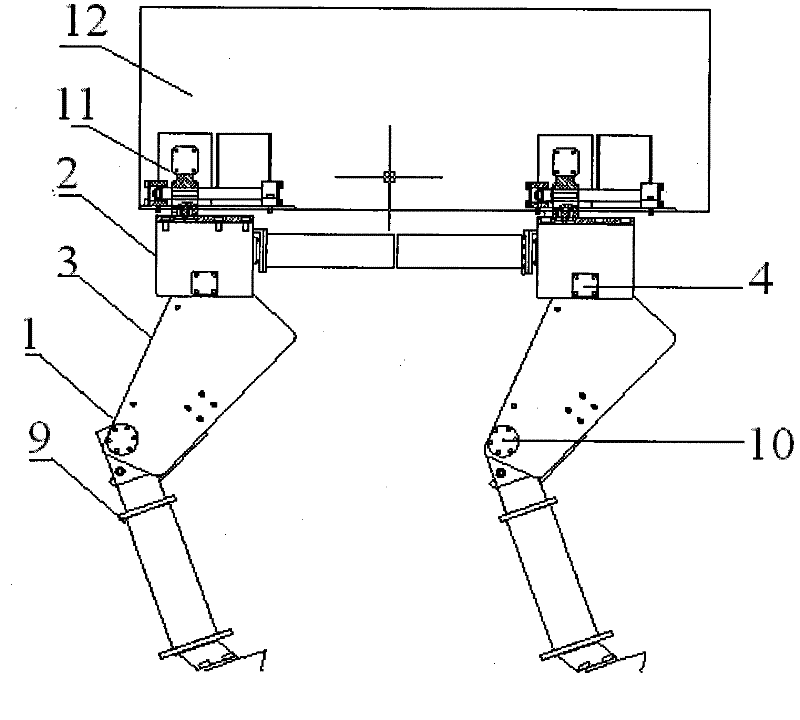
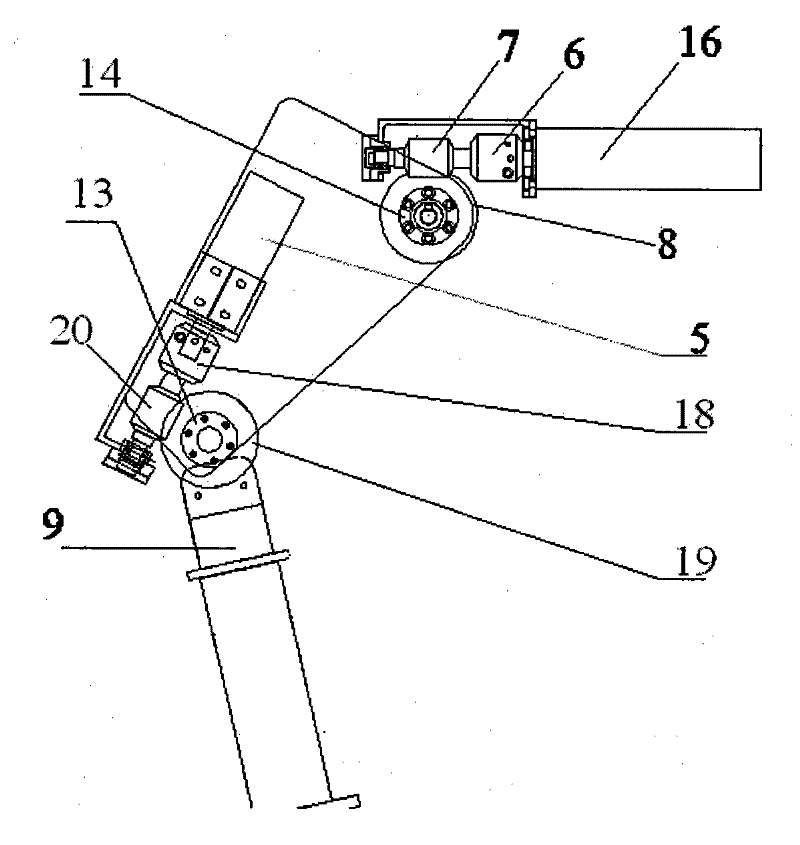
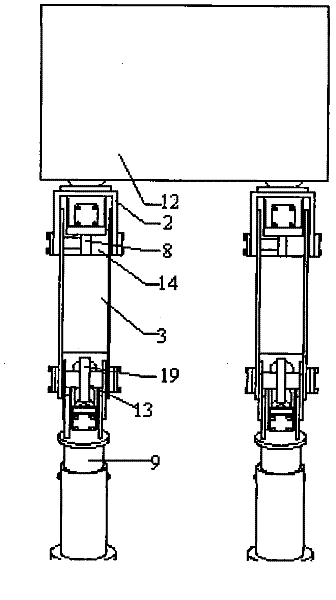
[0039] Such as figure 1 and figure 2 As shown, the present embodiment is a robot leg joint, including a torso 12 , four robot legs 1 , four hip joints 2 , a first rotating pair 4 , a second rotating pair 10 , a third rotating pair 11 and a bracket 13 . Each of the four robot legs 1 includes a thigh 3 and a lower leg 9 . in:
[0040] There are four third rotating pairs 11, which are divided into two groups and installed at the four corners of the trunk 12, corresponding to the installation holes of the hip joints 2, and the trunk 12 is connected to each hip joint 2 through each third rotating pair 11 , and the axes of the turbine shafts of the third rotating pairs 11 are parallel to the center line in the longitudinal direction of the trunk 12; the two third rotating pairs 11 distributed on the same side of the center line in the longitudinal directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More