

Autonomous navigation and obstacle avoidance system and method of indoor mobile robot
A mobile robot and autonomous navigation technology, applied in navigation, surveying and mapping and navigation, radio wave measurement system, etc., can solve problems such as large amount of algorithm calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with the accompanying drawings.
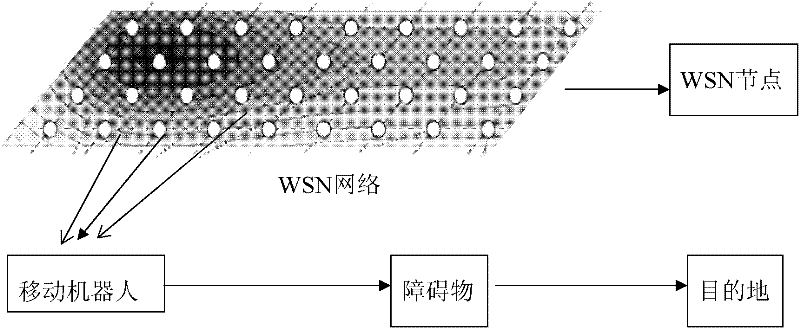
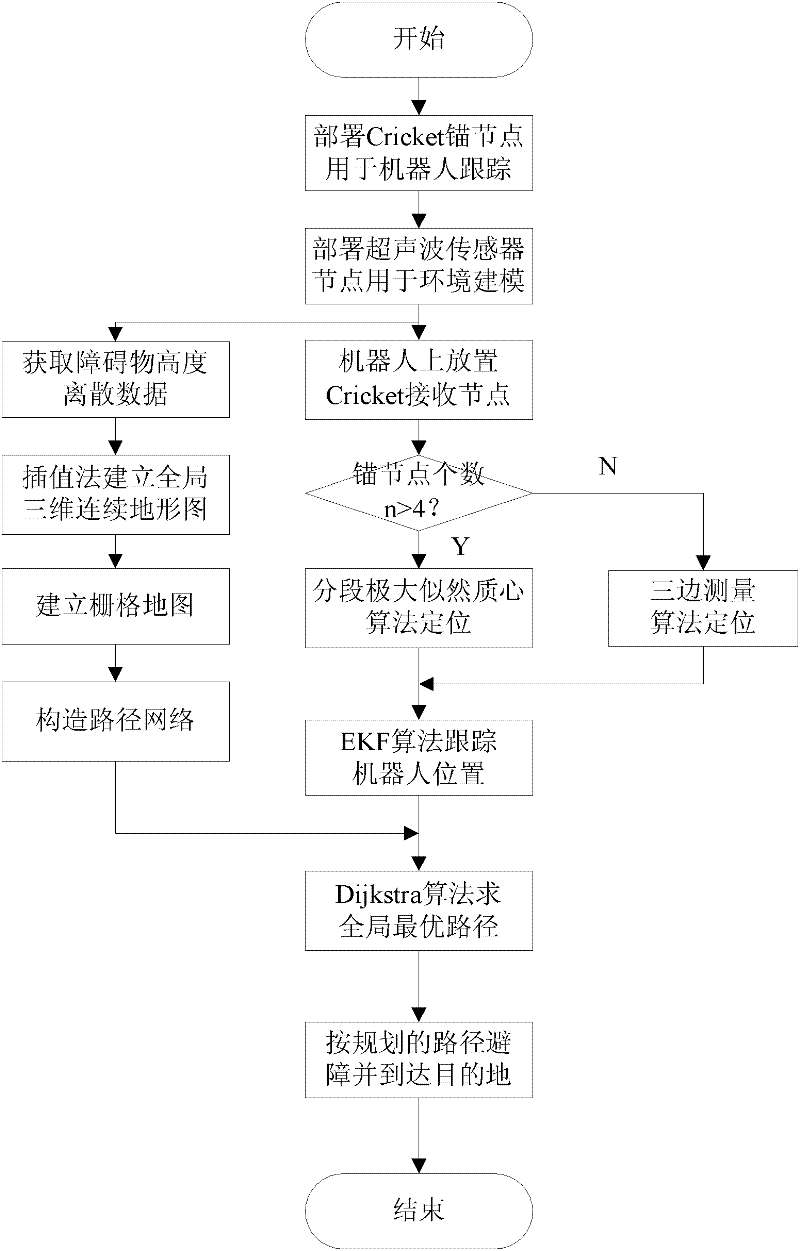
[0069] The autonomous navigation and obstacle avoidance system for indoor mobile robots based on wireless sensor networks includes wireless sensor networks and mobile robots. The sensor network includes Cricket sensor anchor nodes, Cricket sensor receiving nodes and ultrasonic sensor nodes. The Cricket sensor anchor nodes are deployed on the ceiling. The collected wireless signal is sent for robot positioning, and the Cricket sensor receiving node is used to receive the signal sent by the Cricket sensor anchor node. The main control microcontroller of the mobile robot is connected to the SCI serial communication module, and the microcontroller is connected to the Cricket sensor receiving node through this module. After the Cricket sensor receiving node receives the information, it sends the information to the single-chip microcomputer through the SCI serial communicatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More